Positionsregelung mit Puls-/Richtungssignalen
Bevor Sie beginnen
Lesen Sie vor der Inbetriebnahme die Sicherheitshinweise in den betreffenden Operating Instructions der MINAS-Serie.
Dieses Produkt ist nur für den industriellen Einsatz bestimmt.
Elektrische Anschlüsse dürfen nur von Elektrofachkräften vorgenommen werden.
Zu diesem Dokument
Schritt für Schritt wird erklärt, wie Sie eine SPS an einen MINAS-Servoantriebsregler anschließen und die wichtigsten Parameter in der Konfigurationssoftware PANATERM einstellen.
Verfügbare Software
Die folgende Software können Sie kostenlos herunterladen:
-
Dieser Link führt auf die Webseite von Panasonic Industry Co., Ltd.
Programmiersoftware Control FPWIN Pro7 (Basisversion)
Dieser Link führt zum Cotrol FPWIN Pro7 InfoHub.
Funktionsüberblick
Bei der Positionsregelung bewegt der Motor die Last zur angegebenen Sollposition.
Gesteuert wird der Servoantriebsregler von einem Host-Controller, z. B. einer SPS oder einer CNC-Steuerung, oder durch Blockverarbeitung über Pulseingänge mit Pulsfrequenzen zwischen 1Hz und 8MHz. Diese Quick-Start-Anleitung erklärt, wie der Servoantriebsregler verdrahtet und konfiguriert werden muss, damit er Pulse von einer SPS empfangen kann.
Beispiel
Zur Steuerung des Antriebsreglers über E/A-Signale wird eine SPS vom Typ FP0H an einen Servoantriebsregler vom Typ MINAS A6SF angeschlossen. Bei Bedarf können weitere Signale wie „Servo bereit“, „Alarm“ oder „Positionierung abgeschlossen“ übermittelt werden.

- (1) Anschluss an externe Spannungsversorgung
- (2) Anschluss an Endschalter
Verdrahtung
Empfehlungen zur Verdrahtung
Es ist in der Verantwortung des Anwenders, die für notwendig erachteten Maßnahmen umzusetzen, um den gültigen Installationsvorschriften und EMV- Richtlinien zu entsprechen.
Beachten Sie die technischen Daten in den Hardware-Handbüchern der zu verdrahtenden Geräte. Sollten sich Informationen in diesem Dokument und im Handbuch widersprechen, gelten die Angaben des Herstellers.
Detaillierte Hinweise zur Verringerung von Störemissionen finden Sie in den Empfehlungen zur EMV-gerechten Verdrahtung von Servo-Antriebsreglern und -Motoren.
Anschlüsse des Servoantriebsreglers
Anschluss XA (Anschluss für die Spannungsversorgung)
Verbinden Sie das Spannungsversorgungskabel mit dem Anschluss XA. Schließen Sie für eine 1-phasige Spannungsversorgung von 230V eine Zweidrahtleitung wie in der Abbildung gezeigt an den Servoantriebsregler an. Die Klemme L2 wird im 1-Phasenbetrieb nicht benötigt.

Anschluss XB (Motoranschluss)
Verbinden Sie das Motorkabel mit dem Anschluss XB. Die Drähte sind mit den Buchstaben U, V und W beschriftet. Achten Sie darauf, dass Sie die Reihenfolge der Motorphasen nicht ändern, indem Sie z. B. V und W verbinden.

Anschluss X6 (Encoderanschluss)
Verbinden Sie das Encoderkabel mit dem Anschluss X6.

Anschluss X4 (E/A-Anschluss)
Schließen Sie das Verbindungskabel an den Anschluss X4 und die SPS FP0H an. Für PNP-Verbindungen gibt es das vorkonfektionierte Verbindungskabel DV0P0988WP-1.
Von Panasonic sind verschiedene vorkonfektionierte Verbindungskabel für den Anschluss anderer SPS-Typen erhältlich.

- (1) Anschluss an externe Spannungsversorgung
- (2) Anschluss an Endschalter
Anschluss X1 (USB-Anschluss für PC-Verbindung)
Der Servoantriebsregler wird mit der PC-Konfigurationssoftware PANATERM konfiguriert. Verwenden Sie ein handelsübliches USB-Kabel (Typ A auf Mini-B), um den PC mit dem Servoantriebsregler zu verbinden.

Signaleingänge und -ausgänge des Anschlusses X4
Die Positionsregelung erfolgt über die Signaleingänge und -ausgänge am Anschluss X4 des Antriebsreglers MINAS A5/A6. Die Pulseingabe erfolgt entweder über die Line-Driver-Eingänge (44, 45, 46, 47), wenn hohe Geschwindigkeiten oder hohe Auflösungen gefordert sind, oder über die offenen Kollektoreingänge (1, 2, 4, 6 oder 3, 4, 5, 6). Die Pulseingänge sind im Schaltplan hervorgehoben.
In unserem Beispiel verwenden wir folgende Signaleingänge und -ausgänge:
OPC1 (Pin 1), OPC2 (Pin 2), PULS2 (Pin 4), SIGN2 (Pin 6)
Offene Kollektoreingänge für den Empfang der Steuerpulse einer SPS.
SRV-ON (Pin 29)
Eingang "Servo-EIN“ zum Einschalten des Servomotors.
COM+ (Pin 7)
Bezugspotenzial für die Spannungsversorgung der Steuersignale.
S-RDY (Pin 34-35)
Ausgang "Servo betriebsbereit“ zur Anzeige der Betriebsbereitschaft des Servoantriebsreglers.
ALM (Pin 36-37)
Ausgang "Servoalarm".
A-CLR (Pin 31)
Eingang zum Löschen eines Alarms.
INP (Pin 38-39)
Der Ausgang „In Positionsbereich“ wird eingeschaltet, wenn die Sollposition erreicht ist.
Weitere Informationen über die Signaleingänge und -ausgänge, die Sie in Ihrer Applikation verwenden können, entnehmen Sie bitte den Operating Instructions Ihres Servoantriebsreglers MINAS A5/A6 .

PNP-Verdrahtung des Anschlusses X4

NPN-Verdrahtung des Anschlusses X4

Parameter in PANATERM einstellen
Verwenden Sie die PC-Konfigurationssoftware PANATERM, um den MINAS-Servoantriebsregler zu konfigurieren.
- Wählen Sie die Registerkarte Parameter.
- Wählen Sie die Parameterliste Ihres Antriebsreglertyps.

Überblick über die wichtigsten Parameter
Die folgende Tabelle enthält die Einstellungsbereiche und Beschreibungen der wichtigsten Parameter.
Parameter |
Bereich |
Beschreibung |
|---|---|---|
Pr0.00 |
0 oder 1 |
Motordrehrichtung |
Pr0.06 |
0 oder 1 |
Zählrichtung der Steuerpulse |
Pr0.07 |
0 bis 3 |
Zählmodus für Steuerpulse |
Pr0.08 |
0 bis 1048576 [Pulse] (MINAS A5) 0 bis 8388608 [Pulse] (MINAS A6) |
Anzahl Pulssignale per Motorumdrehung |
Pr0.09 |
0 bis 1073741824 |
Zähler des Übersetzungsverhältnisses |
Pr0.10 |
1 bis 1073741824 |
Nenner des Übersetzungsverhältnisses |
Pr5.32 |
250 bis 4000 [kHz] (MINAS A5) 250 bis 8000 [kHz] (MINAS A6) |
Maximale Pulseingangsfrequenz |
Pr0.00 (Motordrehrichtung)
PANATERM-Parameter: Rotational direction setting
Wertebereich: 0 oder 1
Der Standardwert ist 1: Linkslauf (CCW).
Pr0.06 (Zählrichtung der Steuerpulse)
PANATERM-Parameter: Command pulse rotational direction setup
Wertebereich: 0 oder 1
Der Standardwert ist 0: Positive Zählrichtung = B gegenüber A voreilend, Richtungseingang SIGN, HIGH-Signal
In Kombination mit Pr0.07 können Sie bis zu 6 Steuerpulseingangstypen einstellen. Weitere Informationen finden Sie hier: MINAS A5 Series Operating Instructions (Overall) oder MINAS A6 Operating Instructions (Overall).
Pr0.07 (Zählmodus für Steuerpulse)
PANATERM-Parameter: Command pulse input mode setup
Wertebereich: 0 bis 3
Wählen Sie je nach Konfiguration des Host-Controllers einen der folgenden Pulseingangsmodi.
1: Positive/negative Zählrichtung (Vorwärts-/Rückwärtszählen)
Dies ist die Standardeinstellung.

0 oder 2: Inkrementalgebereingang
Wählen Sie diesen Pulseingangsmodus, wenn ein Encoder oder Encoder-Ausgang verwendet wird.

3: Pulsfolge und Richtungssignal
Die Drehrichtung kann geändert werden, indem die Logikpegel des Richtungseingangs geändert werden.

Pr0.08 (Anzahl Pulssignale per Motorumdrehung)
PANATERM-Parameter: Command pulse number per one motor revolution
Wertebereich: 0 bis 1048576 [Pulse] (MINAS A5), 0 bis 8388608 [Pulse] (MINAS A6)
Der Standardwert ist 10000 Pulse pro Motorumdrehung.
Pr0.09 (Zähler des Übersetzungsverhältnisses) und Pr0.10 (Nenner des Übersetzungsverhältnisses)
PANATERM-Parameter: First command division/multiplication numerator (Pr0.09) und Command division/multiplication denominator (Pr0.10)
Wertebereich: 0 bis 1073741824 (Pr0.09) und 1 bis 1073741824 (Pr0.10)
Der Standardwert ist 0 für Pr0.09 und 10000 für Pr0.10.
Wenn Pr0.09 ungleich 0 ist, hat Pr0.08 keine Auswirkungen.
Pr5.32 (Maximale Pulseingangsfrequenz)
PANATERM-Parameter: Command pulse input maximum setup/digital filter setup
Wertebereich: 250 bis 4000 [kHz] (MINAS A5), 250 bis 8000 [kHz] (MINAS A6)
Der Standardwert von 4000kHz (4MHz) gilt vor allem für Host-Controller (CNC oder SPS) mit Line-Driver-Ausgängen. Mit dieser Einstellung kann sich der Servoantriebsregler auf die Pulsausgangsfrequenz des zu erkennenden Host-Controllers vorbereiten.
Wenn die maximale Pulseingangsfrequenz geringer ist als der kleinste einstellbare Wert, beispielsweise bei einer SPS mit einer maximalen Pulsausgangsfrequenz von 100kHz, geben Sie in PANATERM 250 ein, um EMV-Probleme zu minimieren.
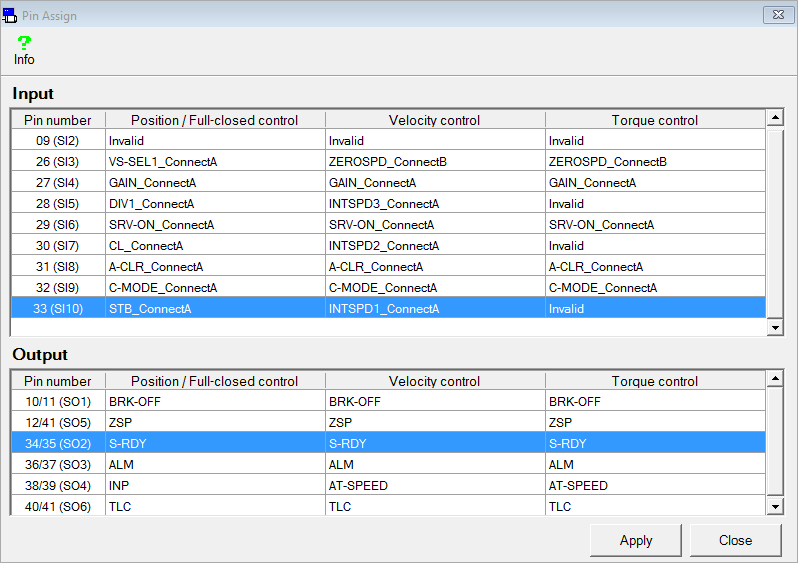
Die Pin-Belegung in PANATERM ändern
Für einige Anwendungen muss die Softwarefunktion der physikalischen Pins des Servoantriebsreglers geändert werden. Verwenden Sie die Konfigurationssoftware PANATERM, um die Pin-Belegung zu ändern.
- Wählen Sie .
Die aktuelle Pin-Belegung wird aus dem Servoantriebsregler geladen.
- Doppelklicken Sie auf einem beliebigen Eingang, der in Ihrer Anwendung nicht benötigt wird.