Positionsregelung mit Modbus-gesteuerter Blockverarbeitung
Bevor Sie beginnen
Lesen Sie vor der Inbetriebnahme die Sicherheitshinweise in den betreffenden Operating Instructions der MINAS-Serie.
Dieses Produkt ist nur für den industriellen Einsatz bestimmt.
Elektrische Anschlüsse dürfen nur von Elektrofachkräften vorgenommen werden.
Zu diesem Dokument
Schritt für Schritt wird erklärt, wie Sie eine SPS an einen MINAS-Servoantriebsregler anschließen und die wichtigsten Parameter in der Konfigurationssoftware PANATERM einstellen.
Verfügbare Software
Die folgende Software können Sie kostenlos herunterladen.
-
Dieser Link führt auf die Webseite von Panasonic Industry Co., Ltd.
Programmiersoftware Control FPWIN Pro7 (Basisversion)
-
Diese Programmierbibliothek für die Modbus-Kommunikation enthält ein Demoprogramm für die Blockverarbeitung.
Funktionsüberblick
Bei der Positionsregelung bewegt der Motor die Last zur angegebenen Sollposition.
Gesteuert wird der Servoantriebsregler von einem Host-Controller, z. B. einer SPS oder einer CNC-Steuerung, oder durch Blockverarbeitung über Pulseingänge mit Pulsfrequenzen zwischen 1Hz und 8MHz. Bei der Blockverarbeitung werden die Positionierparameter mit Blockbefehlen spezifiziert. Der Servoantriebsregler MINAS A6 verfügt über eine Blockspeicherkapazität von 256 Blockbefehlen. Alle Blockbefehle werden im Servoantriebsregler in einer Blockverarbeitungstabelle gespeichert.
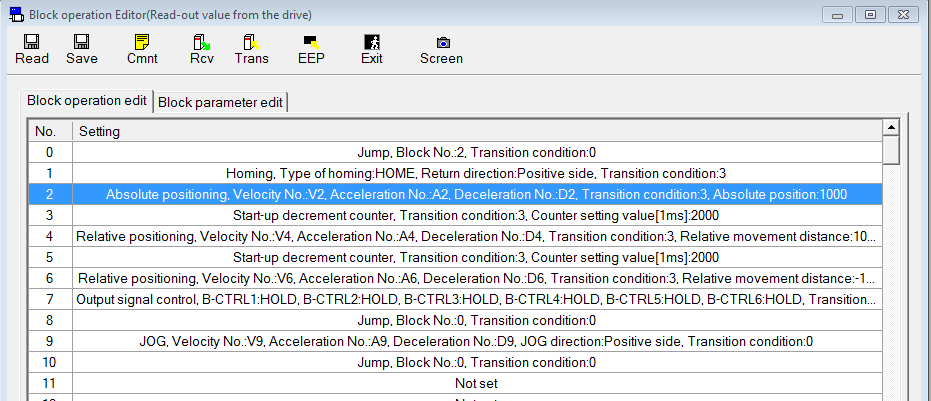
Sie können die Blockbefehle mit der Konfigurationssoftware PANATERM oder mit Modbus-Befehlen spezifizieren, wenn die SPS über eine Modbus-RTU-Schnittstelle verfügt. Die Blockbefehle werden entweder per Digitalsignal von der SPS (z.B. STB, B-SEL1 bis B-SEL128), per Triggerschalter oder per Modbus-Befehl gestartet.
Diese Quick-Start-Anleitung erklärt die Verdrahtung und Konfiguration eines Servoantriebsreglers, der mit Modbus-Befehlen gesteuert wird.
Beispiel
Zur Steuerung eines Antriebsreglers über Modbus-Befehle wird eine SPS vom Typ FP0H an einen Servoantriebsregler vom Typ MINAS A6SF angeschlossen.

Verdrahtung
Empfehlungen zur Verdrahtung
Es ist in der Verantwortung des Anwenders, die für notwendig erachteten Maßnahmen umzusetzen, um den gültigen Installationsvorschriften und EMV- Richtlinien zu entsprechen.
Beachten Sie die technischen Daten in den Hardware-Handbüchern der zu verdrahtenden Geräte. Sollten sich Informationen in diesem Dokument und im Handbuch widersprechen, gelten die Angaben des Herstellers.
Detaillierte Hinweise zur Verringerung von Störemissionen finden Sie in den Empfehlungen zur EMV-gerechten Verdrahtung von Servo-Antriebsreglern und -Motoren.
Anschlüsse des Servoantriebsreglers
Anschluss XA (Anschluss für die Spannungsversorgung)
Verbinden Sie das Spannungsversorgungskabel mit dem Anschluss XA. Schließen Sie für eine 1-phasige Spannungsversorgung von 230V eine Zweidrahtleitung wie in der Abbildung gezeigt an den Servoantriebsregler an. Die Klemme L2 wird im 1-Phasenbetrieb nicht benötigt.

Anschluss XB (Motoranschluss)
Verbinden Sie das Motorkabel mit dem Anschluss XB. Die Drähte sind mit den Buchstaben U, V und W beschriftet. Achten Sie darauf, dass Sie die Reihenfolge der Motorphasen nicht ändern, indem Sie z. B. V und W verbinden.

Anschluss X6 (Encoderanschluss)
Verbinden Sie das Encoderkabel mit dem Anschluss X6.

Anschluss X2 (serielle Kommunikationsschnittstelle)
Verbinden Sie das serielle Kommunikationskabel DV0PM20024CAB mit dem Anschluss X2 und der COM-Schnittstelle (RS232C-Schnittstelle) der SPS FP0H.

Anschluss X1 (USB-Anschluss für PC-Verbindung)
Der Servoantriebsregler wird mit der PC-Konfigurationssoftware PANATERM konfiguriert. Verwenden Sie ein handelsübliches USB-Kabel (Typ A auf Mini-B), um den PC mit dem Servoantriebsregler zu verbinden.

Parameter in PANATERM einstellen
Verwenden Sie die PC-Konfigurationssoftware PANATERM, um den MINAS-Servoantriebsregler zu konfigurieren.
- Wählen Sie die Registerkarte Parameter.
- Wählen Sie die Parameterliste Ihres Antriebsreglertyps.

Überblick über die wichtigsten Parameter
Die folgende Tabelle enthält die Einstellungsbereiche und Beschreibungen der wichtigsten Parameter.
Parameter |
Bereich |
Beschreibung |
|---|---|---|
Pr0.00 |
0 oder 1 |
Motordrehrichtung |
Pr0.01 |
0 bis 6 |
Regelungstyp |
Pr0.08 |
0 bis 1048576 [Pulse] (MINAS A5) 0 bis 8388608 [Pulse] (MINAS A6) |
Anzahl Pulssignale per Motorumdrehung |
Pr4.05 |
0 bis 16777215 |
Funktionszuordnung für Pin 29 an Anschluss X4 |
Pr5.29 |
0 bis 7 |
RS232C-Baudrate |
Pr5.30 |
0 bis 7 |
RS485-Baudrate |
Pr5.31 |
0 bis 127 |
Achsennummer |
Pr5.37 |
0 bis 2 |
Kommunikationsprotokoll |
Pr5.38 |
0 bis 5 |
Parität und Stoppbit für Modbus |
Pr5.39 |
0 bis 10000 |
Wartezeit für Modbus-Antwort |
Pr6.28 |
0 bis 2 |
Blockverarbeitungsmodus |
Pr0.00 (Motordrehrichtung)
PANATERM-Parameter: Rotational direction setting
Wertebereich: 0 oder 1
Der Standardwert ist 1: Linkslauf (CCW).
Pr0.01 (Regelungstyp)
PANATERM-Parameter: Control mode setting
Wertebereich: 0 bis 6
Der Standardwert ist 0: Positionsregelung
Wählen Sie 0: Positionsregelung (der Blockverarbeitungsmodus unterstützt nur die Positionsregelung)
Pr0.08 (Anzahl Pulssignale per Motorumdrehung)
PANATERM-Parameter: Command pulse number per one motor revolution
Wertebereich: 0 bis 1048576 [Pulse] (MINAS A5), 0 bis 8388608 [Pulse] (MINAS A6)
Der Standardwert ist 10000 Pulse pro Motorumdrehung.
Pr4.05 (Funktionszuordnung für Pin 29 an Anschluss X4)
PANATERM-Parameter: SI6 input selection
Wertebereich: 0 bis 16777215
Der Standardwert ist 197379: Eingang "Servo-EIN"
Wählen Sie 0, um die Standard-Pin-Belegung zu deaktivieren.
Pr5.29 (RS232C-Baudrate)
Verwenden Sie diesen Parameter, wenn der Servoantriebsregler über RS232C verbunden ist.
PANATERM-Parameter: RS232 communication baud rate setting
Wertebereich: 0 bis 7 (2400 bis 230400bit/s)
Der Standardwert ist 2 (9600bit/s).
Die im SPS-Programm und im Servoantriebsregler eingestellte Baudrate muss gleich sein. Wählen Sie für dieses Beispiel 6: 115200bit/s.
Pr5.30 (RS485-Baudrate)
Verwenden Sie diesen Parameter, wenn der Servoantriebsregler über RS485 verbunden ist.
PANATERM-Parameter: RS485 communication baud rate setting
Wertebereich: 0 bis 7 (2400 bis 230400bit/s)
Der Standardwert ist 2 (9600bit/s).
Die im SPS-Programm und im Servoantriebsregler eingestellte Baudrate muss gleich sein. Wählen Sie für dieses Beispiel 6: 115200bit/s.
Pr5.31 (Achsennummer)
PANATERM-Parameter: Axis number
Wertebereich: 0 bis 127
Der Standardwert ist 1.
Wählen Sie einen Wert zwischen 1 und 127 0 ist für Modbus-RTU nicht erlaubt. Die im SPS-Programm und im Servoantriebsregler eingestellte Achsennummer muss gleich sein. Wählen Sie für dieses Beispiel Achse 1.
Pr5.37 (Kommunikationsprotokoll)
PANATERM-Parameter: Modbus connection setting
Wertebereich: 0 bis 2
Der Standardwert ist 0 (MINAS-Standardprotokoll).
Wählen Sie 1: Modbus-RTU (RS232-Kommunikation) oder 2: (RS485-Kommunikation), je nach Bedarf.
Pr5.38 (Parität und Stoppbit für Modbus)
PANATERM-Parameter: Modbus communication setting
Wertebereich: 0 bis 5
Der Standardwert ist 0: Gerade/1 Bit
Die im SPS-Programm und im Servoantriebsregler gewählten Einstellungen für Parität und Stoppbit müssen gleich sein.
Wählen Sie für dieses Beispiel „Ungerade/1 Bit“.
Pr5.39 (Wartezeit für Modbus-Antwort)
PANATERM-Parameter: Modbus response waiting time
Wertebereich: 0 bis 10000
Der Standardwert ist 0.
Wählen Sie für die FP0H 5ms. (Wenn Sie einen anderen SPS-Typ verwenden, wählen Sie 0ms für die FP7 und 50ms für die FP-X oder FPS).
Pr6.28 (Blockverarbeitungsmodus)
PANATERM-Parameter: Special function selection
Wertebereich: 0 bis 1
Der Standardwert ist 0.
Wählen Sie 1: Blockverarbeitung gültig (Modbus)
Funktionstest
Sie können Ihre Einstellung leicht mit einem der Demoprogramme in unserer Programmierbibliothek MC_Modbus_Library testen.
|
|
|---|---|
|
Führen Sie Probeläufe des Servomotors nur mit entkoppelter Motorwelle durch, um Unfälle zu vermeiden. |


- Doppelklicken Sie auf die POE _999_Sample_MoveRelative im Navigator.
Die POE wird im Programmierfenster geöffnet.
POE _999_Sample_MoveRelative der MC_Modbus_Library in Control FPWIN Pro 7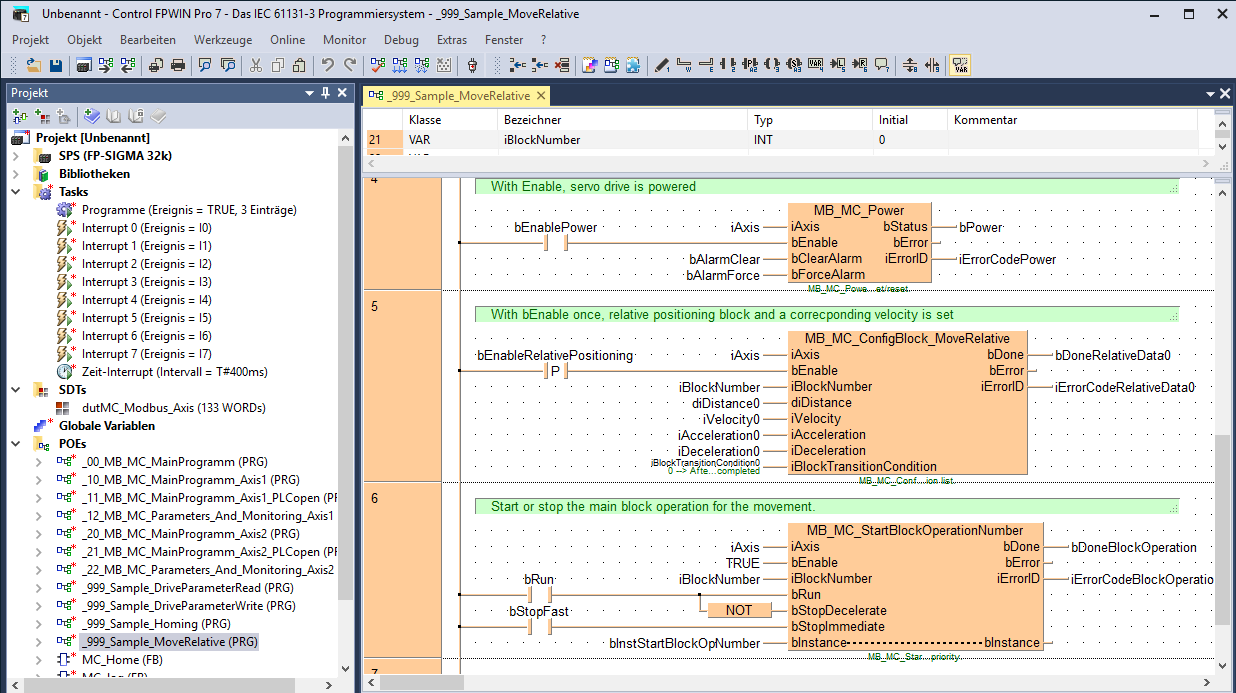
Mit diesem Programm lässt sich eine relative Bewegung an Achse 1 durchführen. In PANATERM muss dieselbe Achse eingestellt sein.