Positionsregelung in EtherCAT-Netzwerken
Bevor Sie beginnen
Lesen Sie vor der Inbetriebnahme die Sicherheitshinweise in den betreffenden Operating Instructions der MINAS-Serie.
Dieses Produkt ist nur für den industriellen Einsatz bestimmt.
Elektrische Anschlüsse dürfen nur von Elektrofachkräften vorgenommen werden.
Zu diesem Dokument
Schritt für Schritt wird erklärt, wie Sie ein FP7-EtherCAT-Modul an einen MINAS-Servoantriebsregler anschließen.
Verfügbare Software
Die folgende Software können Sie kostenlos herunterladen.
-
Dieser Link führt auf die Webseite von Panasonic Industry Co., Ltd.
Tool-Software Control Motion Integrator
Sie erhalten eine Demoversion. Nach 60 Tagen benötigen Sie einen Dongle.
Programmiersoftware Control FPWIN Pro7 (Basisversion)
-
Diese Programmierbibliothek wurde für das FP7-EtherCAT-Modul entwickelt und enthält nützliche Funktionen und Funktionsbausteine für grundlegende Positionieraufgaben.
Funktionsüberblick
Bei der Positionsregelung bewegt der Motor die Last zur angegebenen Sollposition.
Der Servoantriebsregler kann von jedem Host-Controller, der die EtherCAT-Kommunikation unterstützt, per EtherCAT gesteuert werden. Diese Quick-Start-Anleitung erklärt die zur Inbetriebnahme erforderliche Verdrahtung und Konfiguration eines Servoantriebsreglers und eines Host-Controllers.
Konfigurieren Sie das FP7-EtherCAT-Modul mit Hilfe der Tool-Software Control Motion Integrator.
Beispiel
Der Host-Controller ist ein FP7-EtherCAT-Modul. Es ist über ein EtherCAT-Kabel mit dem Servoantriebsregler MINAS A6B verbunden.

- (1) Servoantriebsregler MINAS A6B
- (2) Zu bewegende Last
- (3) Spannungsversorgung 24V DC
- (4) EtherCAT-Kable
- (5) SPS vom Typ FP7 und EtherCAT-Modul
Verdrahtung
Empfehlungen zur Verdrahtung
Es ist in der Verantwortung des Anwenders, die für notwendig erachteten Maßnahmen umzusetzen, um den gültigen Installationsvorschriften und EMV- Richtlinien zu entsprechen.
Beachten Sie die technischen Daten in den Hardware-Handbüchern der zu verdrahtenden Geräte. Sollten sich Informationen in diesem Dokument und im Handbuch widersprechen, gelten die Angaben des Herstellers.
Detaillierte Hinweise zur Verringerung von Störemissionen finden Sie in den Empfehlungen zur EMV-gerechten Verdrahtung von Servo-Antriebsreglern und -Motoren.
Anschlüsse des Servoantriebsreglers
Anschluss XA (Anschluss für die Spannungsversorgung)
Verbinden Sie das Spannungsversorgungskabel mit dem Anschluss XA. Schließen Sie für eine 1-phasige Spannungsversorgung von 230V eine Zweidrahtleitung wie in der Abbildung gezeigt an den Servoantriebsregler an. Die Klemme L2 wird im 1-Phasenbetrieb nicht benötigt.

Anschluss XB (Motoranschluss)
Verbinden Sie das Motorkabel mit dem Anschluss XB. Die Drähte sind mit den Buchstaben U, V und W beschriftet. Achten Sie darauf, dass Sie die Reihenfolge der Motorphasen nicht ändern, indem Sie z. B. V und W verbinden.

Anschluss X6 (Encoderanschluss)
Verbinden Sie das Encoderkabel mit dem Anschluss X6.

Anschluss X1 (USB-Anschluss für PC-Verbindung)
Der Servoantriebsregler wird mit der PC-Konfigurationssoftware PANATERM konfiguriert. Verwenden Sie ein handelsübliches USB-Kabel (Typ A auf Mini-B), um den PC mit dem Servoantriebsregler zu verbinden.

X2A-Anschluss (EtherCAT-Anschluss)
Verbinden Sie das Ethernet-Kabel mit dem Anschluss X2A des Servoantriebsreglers MINAS A6B und der EtherCAT-Schnittstelle des FP7-EtherCAT-Moduls.
Schließen Sie das FP7-EtherCAT-Modul an eine Spannungsversorgung von 24V DC an.


Parameter in PANATERM einstellen
Verwenden Sie die PC-Konfigurationssoftware PANATERM, um den MINAS-Servoantriebsregler zu konfigurieren.
- Wählen Sie die Registerkarte Parameter.
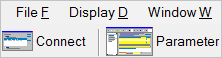
- Wählen Sie die Parameterliste Ihres Antriebsreglertyps.

Die Pin-Belegung in PANATERM ändern
Wenn Sie ein FP7-EtherCAT-Modul verwenden, können die Endschaltereingänge POT und NOT den Pins 07 und 08 nicht zugewiesen werden. (Informationen zur Verwendung dieser Endschalter finden Sie im Handbuch FP7 Motion Control Unit User's Manual.)
- Wählen Sie .
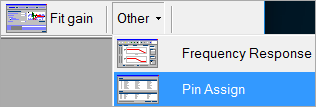
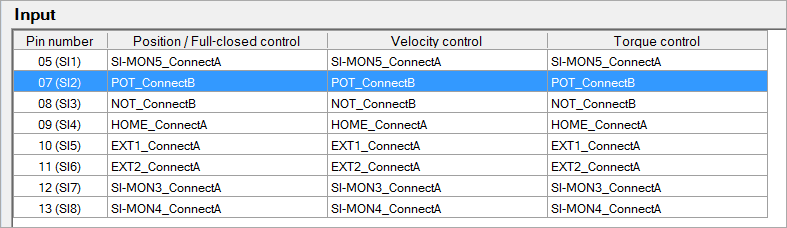
Die aktuelle Pin-Belegung wird aus dem Servoantriebsregler geladen.
- Doppelklicken Sie auf die Zeilen von Pin 07 (SI2) und 08 (SI3).
Parameter in Control Motion Integrator einstellen
Konfigurieren Sie das FP7-EtherCAT-Modul mit Hilfe der Tool-Software Control Motion Integrator. Die Software kann als eigenständiges Produkt oder innerhalb der Programmiersoftware Control FPWIN Pro 7 gestartet werden. In diesem Beispiel verwenden wir die eigenständige Software. Informationen zur Verwendung der Tool-Software in Control FPWIN Pro 7 finden Sie in der Online-Hilfe der Programmierbibliothek MC_EtherCAT_Library.
Wenn die Testperiode von 60 Tagen für die Tool-Software Control Motion Integrator abgelaufen ist, benötigen Sie ein Hardware-Dongle für Ihren PC, um die EtherCAT-Kommunikationseinstellungen zu ändern.
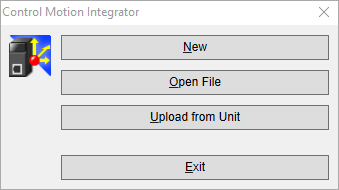
- Wählen Sie New.
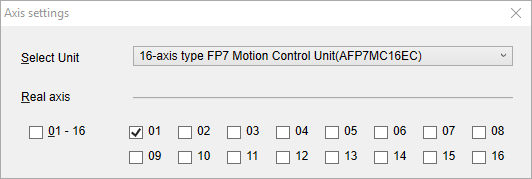
- Wählen Sie das Modul und die Zahl der verbundenen Achsen. In unserem Beispiel verwenden wir nur eine Achse.
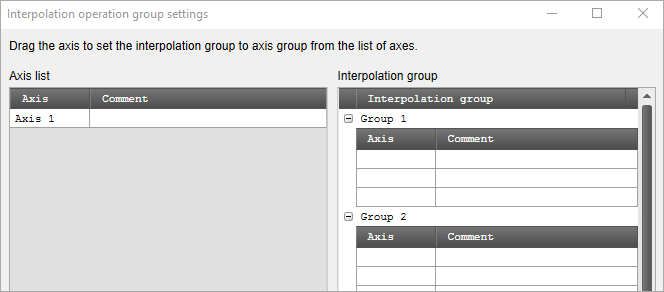
- Da nur eine Achse verwendet wird, gibt es in diesem Beispiel keine Interpolation. Wählen Sie OK.
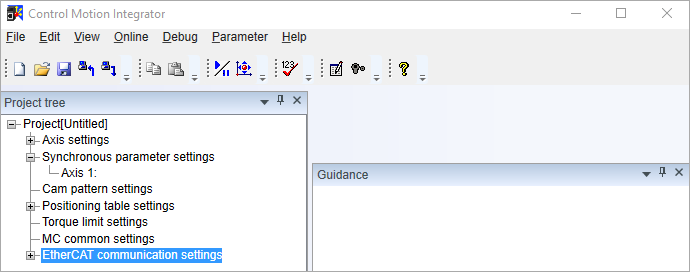
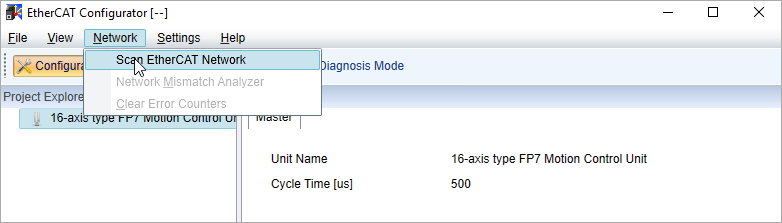
- Doppelklicken Sie auf EtherCAT communication settings, um nach verbundenen Achsen zu suchen.
- Wählen Sie .
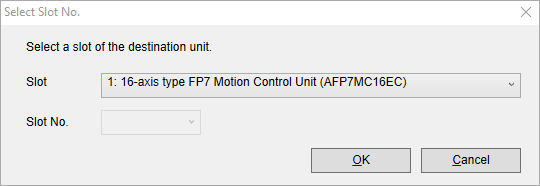
- Wählen Sie die Nummer des Steckplatzes, auf dem das FP7-EtherCAT-Modul installiert ist, und dann OK.
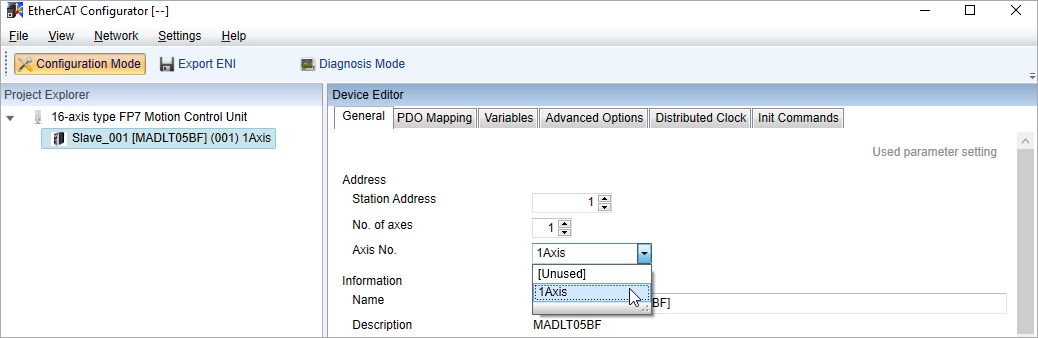
- Die verbundene Achse wird im Project Explorer angezeigt. Wählen Sie die Achsennummer der betreffenden Teilnehmeradresse. Schließen Sie das Fenster.
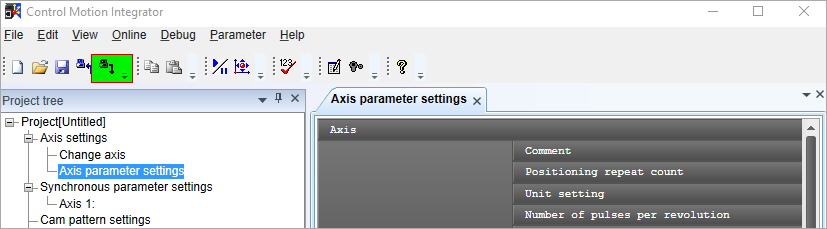
- Klicken Sie auf die grün hervorgehobene Schaltfläche, um die Konfiguration zu übertragen.
- Wählen Sie die Nummer des Steckplatzes, auf dem das FP7-EtherCAT-Modul installiert ist, und dann Yes.
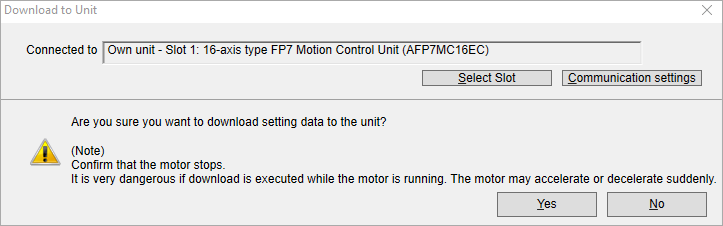
- Schließen Sie den Vorgang mit OK ab.
