Drehmomentregelung
Bevor Sie beginnen
Lesen Sie vor der Inbetriebnahme die Sicherheitshinweise in den betreffenden Operating Instructions der MINAS-Serie.
Dieses Produkt ist nur für den industriellen Einsatz bestimmt.
Elektrische Anschlüsse dürfen nur von Elektrofachkräften vorgenommen werden.
Zu diesem Dokument
Schritt für Schritt wird erklärt, wie Sie eine SPS an einen MINAS-Servoantriebsregler anschließen und die wichtigsten Parameter in der Konfigurationssoftware PANATERM einstellen.
Verfügbare Software
Die folgende Software können Sie kostenlos herunterladen.
-
Dieser Link führt auf die Webseite von Panasonic Industry Co., Ltd.
Funktionsüberblick
Bei der Drehmomentregelung wird das Drehmoment verändert. Die Drehzahl wird in der Regel über Analogsignale (z.B. 0 bis 10V) am Analogeingang des Servoantriebsreglers geregelt. Zusätzlich zum Drehmomentsignal ist ein Drehzahlbegrenzungssignal erforderlich, das die Motordrehzahl begrenzt. Für die Drehmomentregelung gibt es verschiedene Betriebsarten (Drehmomentbefehle).
Diese Quick-Start-Anleitung beschreibt Drehmomentbefehl 0, der Analogeingang 1 und eine Drehzahlbegrenzung verwendet.
Beispiel
Das Analogausgangsmodul FP0RA21 und der Servoantriebsregler MINAS A6SF werden mit dem Kabel DVOP4360V verbunden. Ein Analogsignal von 0 bis 10V wird an den Antriebsregler gesendet. Weitere Signale wie „Servo bereit“ oder der Alarmstatus des Servoantriebsreglers können über dasselbe Kable zur SPS übertragen werden.

Verdrahtung
Empfehlungen zur Verdrahtung
Es ist in der Verantwortung des Anwenders, die für notwendig erachteten Maßnahmen umzusetzen, um den gültigen Installationsvorschriften und EMV- Richtlinien zu entsprechen.
Beachten Sie die technischen Daten in den Hardware-Handbüchern der zu verdrahtenden Geräte. Sollten sich Informationen in diesem Dokument und im Handbuch widersprechen, gelten die Angaben des Herstellers.
Detaillierte Hinweise zur Verringerung von Störemissionen finden Sie in den Empfehlungen zur EMV-gerechten Verdrahtung von Servo-Antriebsreglern und -Motoren.
Anschlüsse des Servoantriebsreglers
Anschluss XA (Anschluss für die Spannungsversorgung)
Verbinden Sie das Spannungsversorgungskabel mit dem Anschluss XA. Schließen Sie für eine 1-phasige Spannungsversorgung von 230V eine Zweidrahtleitung wie in der Abbildung gezeigt an den Servoantriebsregler an. Die Klemme L2 wird im 1-Phasenbetrieb nicht benötigt.

Anschluss XB (Motoranschluss)
Verbinden Sie das Motorkabel mit dem Anschluss XB. Die Drähte sind mit den Buchstaben U, V und W beschriftet. Achten Sie darauf, dass Sie die Reihenfolge der Motorphasen nicht ändern, indem Sie z. B. V und W verbinden.

Anschluss X6 (Encoderanschluss)
Verbinden Sie das Encoderkabel mit dem Anschluss X6.

Anschluss X4 (E/A-Anschluss)
Schließen Sie das Verbindungskabel an den Anschluss X4 und das Analogausgangsmodul an.

Anschluss X1 (USB-Anschluss für PC-Verbindung)
Der Servoantriebsregler wird mit der PC-Konfigurationssoftware PANATERM konfiguriert. Verwenden Sie ein handelsübliches USB-Kabel (Typ A auf Mini-B), um den PC mit dem Servoantriebsregler zu verbinden.

Signaleingänge und -ausgänge des Anschlusses X4
Die Drehzahlregelung erfolgt über einen Analogeingang mit einer Auflösung von 16 Bit am Anschluss X4 des Servoantriebsreglers MINAS A5/A6. Der Spannungsbereich ist 0V bis +/-10V. Der Analogeingang ist im Schaltplan hervorgehoben.
In unserem Beispiel verwenden wir folgende Signaleingänge und -ausgänge:
SRV-ON (Pin 29)
Eingang "Servo-EIN“ zum Einschalten des Servomotors.
COM+ (Pin 7)
Bezugspotenzial für die Spannungsversorgung der Steuersignale.
SPR/TRQR/SPL (Pin 14-15)
Analoger Drehmomentbefehlseingang.
S-RDY (Pin 34-35)
Ausgang "Servo betriebsbereit“ zur Anzeige der Betriebsbereitschaft des Servoantriebsreglers.
ALM (Pin 36-37)
Ausgang "Servoalarm".
AT-SPEED (Pin 38-39)
Der Ausgang "Drehzahl erreicht“ wird eingeschaltet, wenn die mit Pr4.36 festgelegte Drehzahl erreicht ist.
Weitere Informationen über die Signaleingänge und -ausgänge, die Sie in Ihrer Applikation verwenden können, entnehmen Sie bitte den Operating Instructions Ihres Servoantriebsreglers MINAS A5/A6 .

PNP-Verdrahtung des Anschlusses X4

NPN-Verdrahtung des Anschlusses X4

Parameter in PANATERM einstellen
Verwenden Sie die PC-Konfigurationssoftware PANATERM, um den MINAS-Servoantriebsregler zu konfigurieren.
- Wählen Sie die Registerkarte Parameter.
- Wählen Sie die Parameterliste Ihres Antriebsreglertyps.

Überblick über die wichtigsten Parameter
Die folgende Tabelle enthält die Einstellungsbereiche und Beschreibungen der wichtigsten Parameter.
Parameter |
Bereich |
Beschreibung |
|---|---|---|
Pr0.01 |
0 bis 6 |
Regelungstyp |
Pr3.17 |
0 bis 2 |
Drehmomentbefehlseingang |
Pr3.18 |
0 bis 1 |
Drehmomentbefehlsrichtung |
Pr3.19 |
10 bis 100 [0,1V/100%] |
Eingangsverstärkung des Drehmomentbefehls |
Pr3.20 |
0 bis 1 |
Invertierung des Drehmomentbefehlseingangs |
Pr3.21 |
0 bis 20000 [ms/(1000U/min)] |
Drehzahlgrenzwert 1 |
Pr4.22 |
-27888 bis 27888 LSB (MINAS A5) -5578 bis 5578 LSB (MINAS A6) |
Offset für Analogeingang 1 |
Pr4.23 |
0,00 bis 64,00 [ms] (MINAS A5, MINAS A6F) |
Filter für Analogeingang 1 |
Pr4.36 |
10 bis 20000 [U/min] |
Drehzahlerreichung |
Pr0.01 (Regelungstyp)
PANATERM-Parameter: Control mode setting
Wertebereich: 0 bis 6
Wählen Sie 2: Drehmomentregelung
Pr3.17 (Drehmomentbefehlseingang)
PANATERM-Parameter: Torque command selection
Wertebereich: 0 bis 2
- 0: Analogeingang 1, Auflösung 16 Bit, Drehzahlbegrenzung entsprechend Pr3.25
- 1: Analogeingang 2, Auflösung 12 Bit, Drehzahlbegrenzung entsprechend Analogeingang 1
- 2: Analogeingang 1, Auflösung 16 Bit, Drehzahlbegrenzung entsprechend Pr3.21, Pr3.22
Pr3.18 (Drehmomentbefehlsrichtung)
PANATERM-Parameter: Torque command direction designation selection
Wertebereich: 0 bis 1
- 0: Vorzeichen des Drehmomentbefehls (positiver Drehmomentbefehl für positive Richtung, negativer Drehmomentbefehl für negative Richtung)
- 1: TC-SIGN-Eingang (OFF: positive Richtung, ON: negative Richtung)
Pr3.19 (Eingangsverstärkung des Drehmomentbefehls)
PANATERM-Parameter: Torque command input gain
Wertebereich: 10 bis 100 [0,1V/100%]
Wählen Sie den Verstärkungsfaktor für das Motordrehmoment entsprechend der am Drehmomentbefehlseingang TRQR anliegenden Spannung. Ein Wert von 30 erzeugt bei einer Eingangsspannung von 3V z.B. ein Drehmoment von 100%.
Pr3.20 (Invertierung des Drehmomentbefehlseingangs)
PANATERM-Parameter: Torque command input inversion
Wertebereich: 0 bis 1
- 0: Keine Invertierung, positive Drehrichtung bei positiver Spannung
- 1: Invertierung, positive Drehrichtung bei negativer Spannung
Pr3.21 (Drehzahlgrenzwert 1)
PANATERM-Parameter: Speed limit value 1
Wertebereich: 0 bis 20000
Standardwert: 0
Wählen Sie die Drehzahlbegrenzung für die Drehmomentregelung.
Pr4.22 (Offset für Analogeingang 1)
PANATERM-Parameter: Analog input 1 (A|1) offset setting
- -27888 bis 27888 LSB (MINAS A5)
- -5578 bis 5578 LSB (MINAS A6)
Der Standardwert ist 0.
Wählen Sie einen Offsetwert, um mit einem zusätzlichen Drehmoment auf die Antriebswelle die Drift zu kompensieren.
Pr4.23 (Filter für Analogeingang 1)
PANATERM-Parameter: Analog input 1 (A|1) filter setting
Wertebereich: 0,00 bis 64,00 [ms]
Der Standardwert ist 0.
Der Parameter fungiert als Tiefpass-Filter zur Stabilisierung der Spannung: je höher der Wert, desto größer die Verzögerung.
Pr4.36 (Drehzahlerreichung)
- At-speed (MINAS A5)
- Attainment speed (MINAS A6)
Wertebereich: 10 bis 20000 [U/min/V]
Der Standardwert ist 1000U/min.
Wenn die mit diesem Parameter eingestellte Motordrehzahl erreicht ist, wird der Ausgang AT-SPEED eingeschaltet.
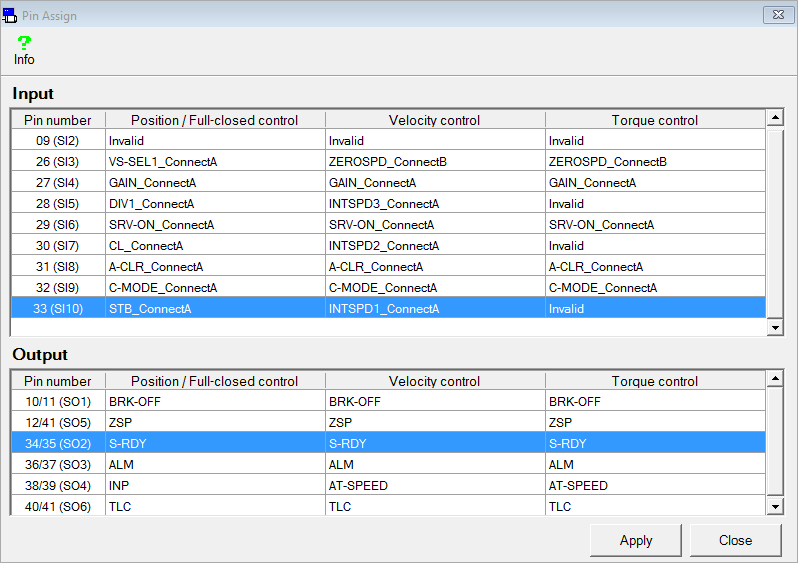
Die Pin-Belegung in PANATERM ändern
Für einige Anwendungen muss die Softwarefunktion der physikalischen Pins des Servoantriebsreglers geändert werden. Verwenden Sie die Konfigurationssoftware PANATERM, um die Pin-Belegung zu ändern.
- Wählen Sie .
Die aktuelle Pin-Belegung wird aus dem Servoantriebsregler geladen.
- Doppelklicken Sie auf einem beliebigen Eingang, der in Ihrer Anwendung nicht benötigt wird.