PANATERM – Fit-- Gain-Autotuning
Bevor Sie beginnen
Lesen Sie vor der Inbetriebnahme die Sicherheitshinweise in den betreffenden Operating Instructions der MINAS-Serie.
Dieses Produkt ist nur für den industriellen Einsatz bestimmt.
Elektrische Anschlüsse dürfen nur von Elektrofachkräften vorgenommen werden.
Zu diesem Dokument
Schritt-für-Schritt wird die Echtzeit-Autotuning-Funktion eines MINAS-Servoantriebsreglers erklärt. Das Autotuning wird mit der Konfigurationssoftware PANATERM konfiguriert.
Verfügbare Software
Die folgende Software können Sie kostenlos herunterladen.
-
Dieser Link führt auf die Webseite von Panasonic Industry Co., Ltd.
Funktionsüberblick
Autotuning ist für alle Anwendungen erforderlich, um den Servomotor auf die mechanischen Bedingungen abzustimmen. Sie haben die Wahl zwischen folgenden Autotuning-Funktionen:
Fit-Gain-Autotuning
Echtzeit-Autotuning
Diese Quick-Start-Anleitung erklärt die Anwendung des Fit-Gain-Autotunings.
Während das Fit-Gain-Autotuning den Anwender durch eine automatische Feinanpassung führt, optimiert das Echtzeit-Autotuning hauptsächlich die mechanische Steifigkeit der Maschine. Führen Sie beim Antriebsregler MINAS A6 zuerst das Fit-Gain-Autotuning durch. Erst wenn das Fit-Gain-Autotuning nicht erfolgreich war, wenden Sie das Echtzeit-Autotuning an. Beide Verfahren können mit PANATERM ausgeführt werden.
Wenn möglich sollten Sie das Echtzeit-Autotuning an der Maschine mit angeschlossenem Motor, realer Last und den tatsächlichen Bewegungen durchführen.
Das Autotuning verfolgt normalerweise folgende Ziele:
Verringerung der Ausregelzeit, um die Zykluszeiten zu reduzieren.
Verringerung der mechanischen Schwingungen, um die Lebensdauer der Maschine zu verlängern.
Verringerung von Über- und Unterschwingungen, damit die Sollposition innerhalb der zulässigen Hysterese erreicht wird.
Verringerung der Ansprechzeiten, damit die Sollposition schneller erreicht wird.
Überschwingen, Unterschwingen und Ausregelzeit des Positionswertes
Beispiel
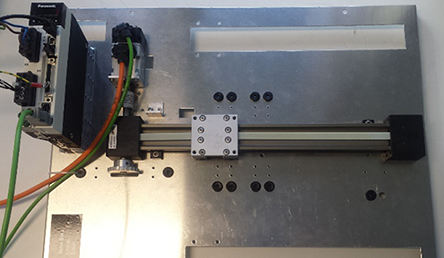
Ein Servoantriebsregler vom Typ MINAS A6SF ist mit einem Servomotor verbunden, der ein Förderband antreibt. Die Regelung erfolgt über eine Positionsregelung. Dies erfordert eine kontinuierliche Bewegung innerhalb der mechanischen Grenzen, keine mechanischen Schwingungen, kein Überschwingen, kein Unterschwingen und eine möglichst geringe Ausregelzeit.
Verdrahtung
Empfehlungen zur Verdrahtung
Es ist in der Verantwortung des Anwenders, die für notwendig erachteten Maßnahmen umzusetzen, um den gültigen Installationsvorschriften und EMV- Richtlinien zu entsprechen.
Beachten Sie die technischen Daten in den Hardware-Handbüchern der zu verdrahtenden Geräte. Sollten sich Informationen in diesem Dokument und im Handbuch widersprechen, gelten die Angaben des Herstellers.
Detaillierte Hinweise zur Verringerung von Störemissionen finden Sie in den Empfehlungen zur EMV-gerechten Verdrahtung von Servo-Antriebsreglern und -Motoren.
Anschlüsse des Servoantriebsreglers
Anschluss XA (Anschluss für die Spannungsversorgung)
Verbinden Sie das Spannungsversorgungskabel mit dem Anschluss XA. Schließen Sie für eine 1-phasige Spannungsversorgung von 230V eine Zweidrahtleitung wie in der Abbildung gezeigt an den Servoantriebsregler an. Die Klemme L2 wird im 1-Phasenbetrieb nicht benötigt.

Anschluss XB (Motoranschluss)
Verbinden Sie das Motorkabel mit dem Anschluss XB. Die Drähte sind mit den Buchstaben U, V und W beschriftet. Achten Sie darauf, dass Sie die Reihenfolge der Motorphasen nicht ändern, indem Sie z. B. V und W verbinden.

Anschluss X6 (Encoderanschluss)
Verbinden Sie das Encoderkabel mit dem Anschluss X6.

Anschluss X1 (USB-Anschluss für PC-Verbindung)
Der Servoantriebsregler wird mit der PC-Konfigurationssoftware PANATERM konfiguriert. Verwenden Sie ein handelsübliches USB-Kabel (Typ A auf Mini-B), um den PC mit dem Servoantriebsregler zu verbinden.

Fit-Gain-Autotuning ausführen
Verwenden Sie die Konfigurationssoftware PANATERM, um das Autotuning durchzuführen.
- Wählen Sie die Registerkarte Fit gain.

- (1) Registerkarte Fit gain
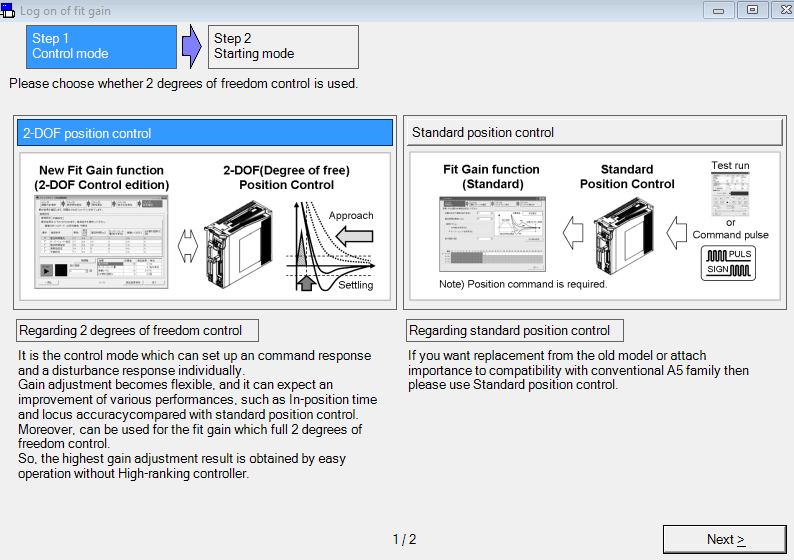
- Wählen Sie 2-DOF position control und dann Next.
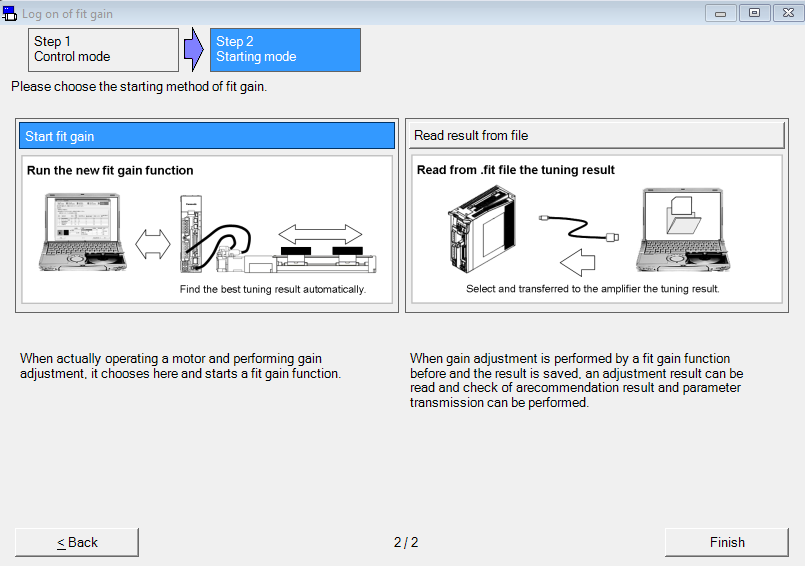
- Wählen Sie Start fit gain und dann Finish.
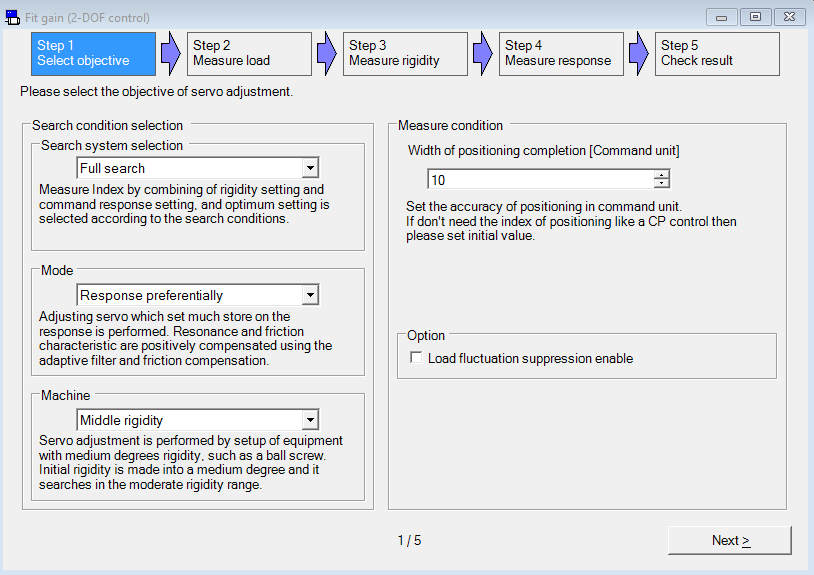
- Wählen Sie in Step 1 des Autotuning-Verfahrens eine der folgenden Optionen: Response preferentially, Balanced oder Stability preferentially. Wählen Sie Next.
- Wählen Sie in Step 2 die Schaltfläche SRV ON. Beachten Sie den angezeigten Sicherheitshinweis und bestätigen Sie mit OK.
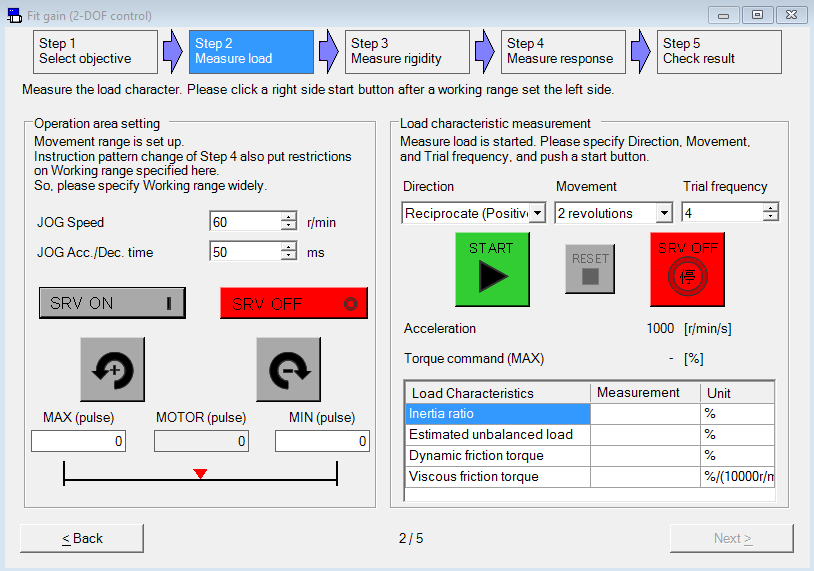
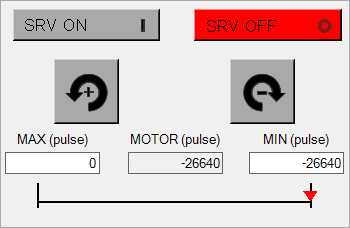
- Stellen Sie mit den JOG-Schaltflächen eine kurze Verfahrstrecke für den Motor ein.
- Wählen Sie im Listenfeld Trial frequency die Option 2, um die Zeit für das Fit-Gain-Autotuning zu verringern.
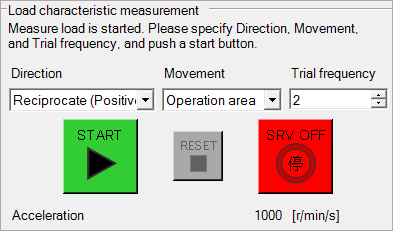
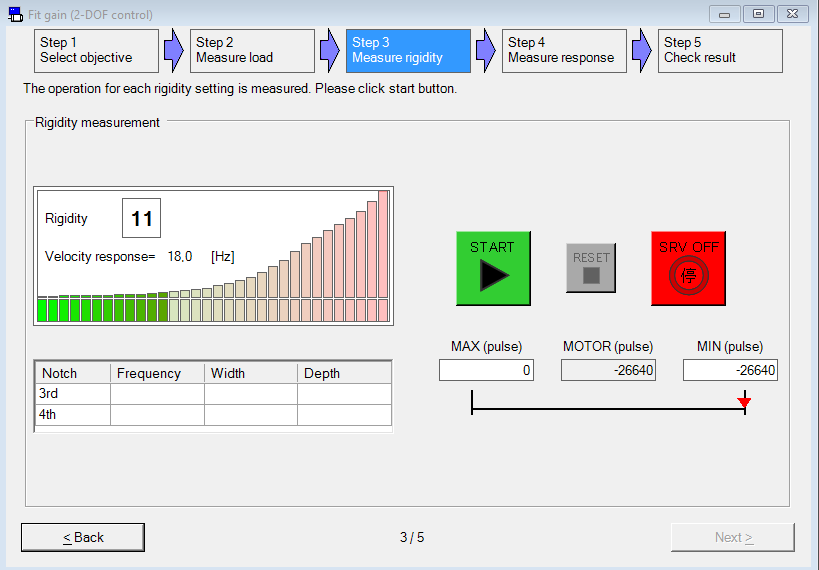
- Wählen Sie in Step 3 die grüne Schaltfläche START, um die optimale Steifigkeit der Last zu messen.

Nach diesem Schritt können kurz Schwingungen der Last auftreten. Sorgen Sie dafür, dass Sie die Bewegung jederzeit durch Abschalten der Servo-Funktion anhalten können, um Schäden zu vermeiden.
Bestätigen Sie nach der Messung die angezeigte Meldung und wählen Sie Next.
- Wählen Sie in Step 4 die grüne Schaltfläche START, um die Befehlsantwort zu messen.
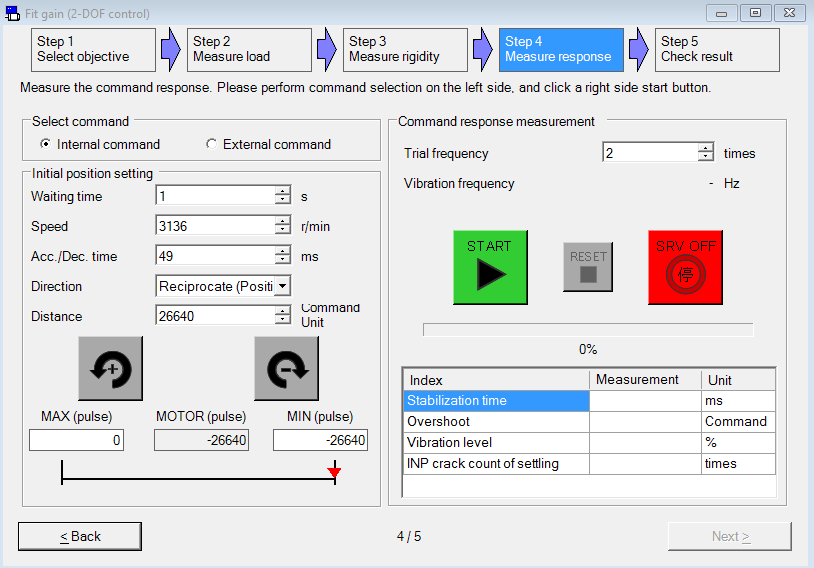
Bestätigen Sie nach der Messung die angezeigte Meldung und wählen Sie Next.
- In Step 5 werden vier verschiedene Tuning-Ergebnisse angezeigt. Das empfohlene Ergebnis ist mit einem Häkchen markiert. Wählen Sie Save fit gain data, wenn Sie die Ergebnisse des Tunings in einer Datei speichern möchten.
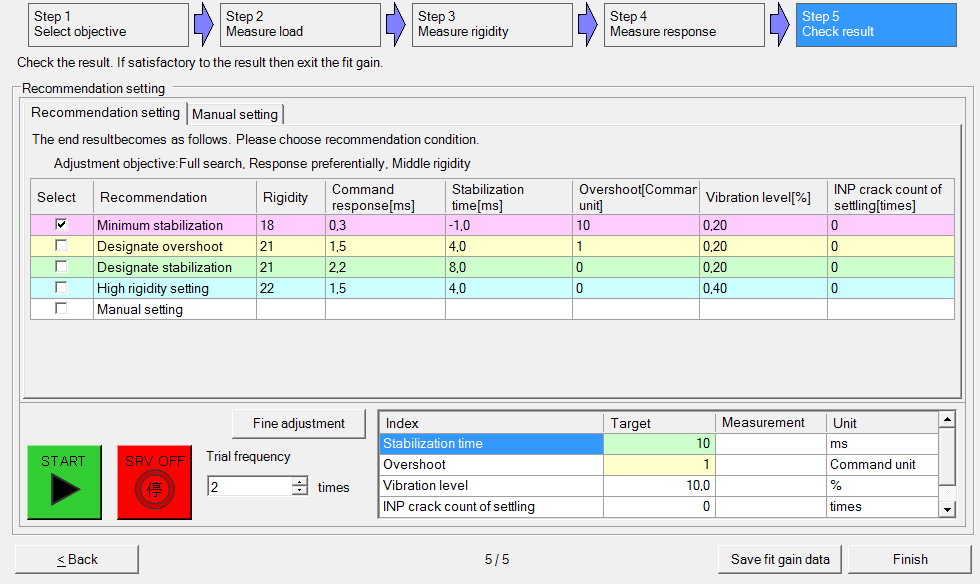
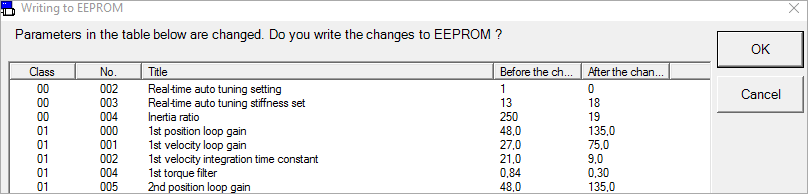
- Wählen Sie im Dialogfeld Writing to EEPROM OK, wenn Sie die Parameter im Servoantriebsregler MINAS A6 speichern möchten.