Positionsregelung mit SIMATIC S7-1200-Host-Controller über Modbus RTU
Bevor Sie beginnen
Lesen Sie vor der Inbetriebnahme die Sicherheitshinweise in den betreffenden Operating Instructions. Dieses Produkt ist nur für den industriellen Einsatz bestimmt. Elektrische Anschlüsse dürfen nur von Elektrofachkräften vorgenommen werden.
Verwandte Dokumente
Technical Reference - Modbus communication and block operation specification (SX-DSV03042) für MINAS A6. Dieses Handbuch kann von der Website der Panasonic Industry Co., Ltd heruntergeladen werden
 .
.SIMATIC S7-1200 Programmable controller System Manual.
Konfiguration

In diesem Beispiel wird die SPS SIMATIC S7-2100 über Modbus RTU mit einem Antriebsregler MINAS A6SF verbunden.
Für die SPS ist ein Kommunikationsboard erforderlich, das die Kommunikation über Modbus RTU unterstützt.
Für die RS485-Verbindung zum Kommunikationsboard wird ein spezielles Kommunikationskabel verwendet.
Im Beispiel verwendete Hardware und Software:
Geräte:
Antriebsregler und Motor der Serie MINAS A6SF
SPS SIMATIC S7-1200 (6ES7-212-1BE40-0XB0), Firmware-Version 4.7.0
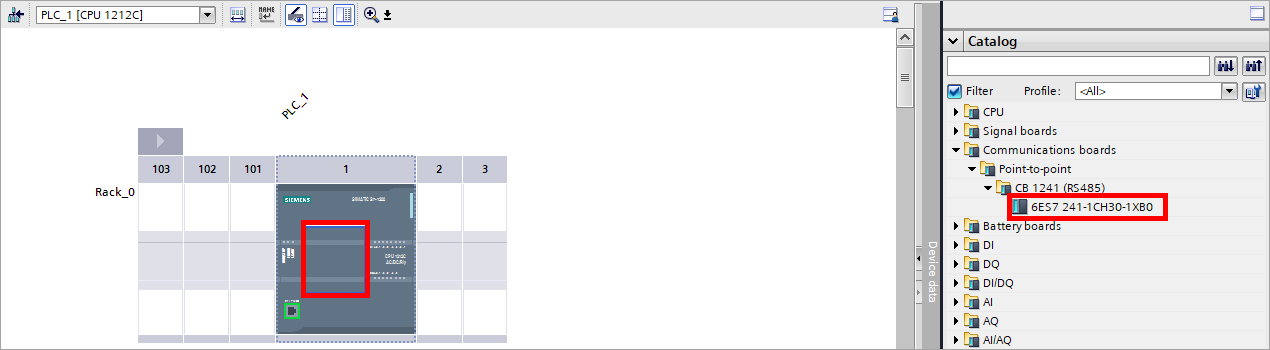
Kommunikationsboard für SIMATIC S7-1200 CB 1241, RS-485 (6ES7-241-1CH30-1XB0)
Kabel:
RS485/RS232 Kommunikationskabel für MINAS A6 (X2), 8-polig, 2m QUAE0002071 (DV0PM20024CAB)
Software:
STEP 7 (TIA Portal) V17
PANATERM (kostenlos)
Verdrahtung
Empfehlungen zur Verdrahtung
Es ist in der Verantwortung des Anwenders, die für notwendig erachteten Maßnahmen umzusetzen, um den gültigen Installationsvorschriften und EMV- Richtlinien zu entsprechen.
Beachten Sie die technischen Daten in den Hardware-Handbüchern der zu verdrahtenden Geräte. Sollten sich Informationen in diesem Dokument und im Handbuch widersprechen, gelten die Angaben des Herstellers.
Detaillierte Hinweise zur Verringerung von Störemissionen finden Sie in den Empfehlungen zur EMV-gerechten Verdrahtung von Servo-Antriebsreglern und -Motoren.
Servoantriebsregler anschließen
Anschluss XA (Anschluss für die Spannungsversorgung)
Verbinden Sie das Spannungsversorgungskabel mit dem Anschluss XA. Schließen Sie für eine 1-phasige Spannungsversorgung von 230V eine Zweidrahtleitung wie in der Abbildung gezeigt an den Servoantriebsregler an. Die Klemme L2 wird im 1-Phasenbetrieb nicht benötigt.

Anschluss XB (Motoranschluss)
Verbinden Sie das Motorkabel mit dem Anschluss XB. Die Drähte sind mit den Buchstaben U, V und W beschriftet. Achten Sie darauf, dass Sie die Reihenfolge der Motorphasen nicht ändern, indem Sie z. B. V und W verbinden.

Anschluss X6 (Encoderanschluss)
Verbinden Sie das Encoderkabel mit dem Anschluss X6.

Anschluss X2 (serielle Kommunikationsschnittstelle)
Verbinden Sie das serielle Kommunikationskabel QUAE0002071 (DV0PM20024CAB020) mit dem Anschluss X2 und dem Kommunikationsboard der SPS S7-1200.


Verbinden Sie die Kontakte wie folgt:
TA mit T/RA und TB mit T/RB.
Die kurzgeschlossenen Kontakte TA-T und RA mit dem negativen Anschluss des Antriebsreglers.
Die kurzgeschlossenen Kontakte TB-T und RB mit dem positiven Anschluss des Antriebsreglers.
Der Anschluss von GND an M ist nicht erforderlich.
Anschluss X1 (USB-Anschluss für PC-Verbindung)
Der Servoantriebsregler wird mit der PC-Konfigurationssoftware PANATERM konfiguriert. Verwenden Sie ein handelsübliches USB-Kabel (Typ A auf Mini-B), um den PC mit dem Servoantriebsregler zu verbinden.

Parameter in PANATERM einstellen
Verwenden Sie die PC-Konfigurationssoftware PANATERM, um den MINAS-Servoantriebsregler zu konfigurieren.
- Wählen Sie die Registerkarte Parameter.
- Wählen Sie die Parameterliste Ihres Antriebsreglertyps.

Überblick über die wichtigsten Parameter
Die folgende Tabelle enthält die Einstellungsbereiche und Beschreibungen der wichtigsten Parameter.
Parameter |
Bereich |
Beschreibung |
|---|---|---|
Pr0.00 |
0 oder 1 |
Motordrehrichtung |
Pr0.01 |
0 bis 6 |
Regelungstyp |
Pr0.08 |
0 bis 1048576 [Pulse] (MINAS A5) 0 bis 8388608 [Pulse] (MINAS A6) |
Anzahl Pulssignale per Motorumdrehung |
Pr4.05 |
0 bis 16777215 |
Funktionszuordnung für Pin 29 an Anschluss X4 |
Pr5.29 |
0 bis 7 |
RS232C-Baudrate |
Pr5.30 |
0 bis 7 |
RS485-Baudrate |
Pr5.31 |
0 bis 127 |
Achsennummer |
Pr5.37 |
0 bis 2 |
Kommunikationsprotokoll |
Pr5.38 |
0 bis 5 |
Parität und Stoppbit für Modbus |
Pr5.39 |
0 bis 10000 |
Wartezeit für Modbus-Antwort |
Pr6.28 |
0 bis 2 |
Blockverarbeitungsmodus |
Pr0.00 (Motordrehrichtung)
PANATERM-Parameter: Rotational direction setting
Wertebereich: 0 oder 1
Der Standardwert ist 1: Linkslauf (CCW).
Pr0.01 (Regelungstyp)
PANATERM-Parameter: Control mode setting
Wertebereich: 0 bis 6
Der Standardwert ist 0: Positionsregelung
Wählen Sie 0: Positionsregelung (der Blockverarbeitungsmodus unterstützt nur die Positionsregelung)
Pr0.08 (Anzahl Pulssignale per Motorumdrehung)
PANATERM-Parameter: Command pulse number per one motor revolution
Wertebereich: 0 bis 8388608 [Pulse]
Der Standardwert ist 10000 Pulse pro Motorumdrehung.
Pr4.05 (Funktionszuordnung für Pin 29 an Anschluss X4)
PANATERM-Parameter: SI6 input selection
Wertebereich: 0 bis 16777215
Der Standardwert ist 197379: Eingang "Servo-EIN"
Wählen Sie 0, um die Standard-Pin-Belegung zu deaktivieren.
Pr5.30 (RS485-Baudrate)
Verwenden Sie diesen Parameter, wenn der Servoantriebsregler über RS485 verbunden ist.
PANATERM-Parameter: RS485 communication baud rate setting
Wertebereich: 0 bis 7 (2400 bis 230400bit/s)
Der Standardwert ist 2 (9600bit/s).
Die im SPS-Programm und im Servoantriebsregler eingestellte Baudrate muss gleich sein.
Pr5.31 (Achsennummer)
PANATERM-Parameter: Axis number
Wertebereich: 0 bis 127
Der Standardwert ist 1.
Wählen Sie einen Wert zwischen 1 und 127 0 ist für Modbus-RTU nicht erlaubt. Die im SPS-Programm und im Servoantriebsregler eingestellte Achsennummer muss gleich sein.
Pr5.37 (Kommunikationsprotokoll)
PANATERM-Parameter: Modbus connection setting
Wertebereich: 0 bis 2
Der Standardwert ist 0 (MINAS-Standardprotokoll).
Wählen Sie 2: Modbus-RTU (RS485-Kommunikation).
Pr5.38 (Parität und Stoppbit für Modbus)
PANATERM-Parameter: Modbus communication setting
Wertebereich: 0 bis 5
Der Standardwert ist 0: Gerade/1 Bit
Die im SPS-Programm und im Servoantriebsregler gewählten Einstellungen für Parität und Stoppbit müssen gleich sein.
Pr5.39 (Wartezeit für Modbus-Antwort)
PANATERM-Parameter: Modbus response waiting time
Wertebereich: 0 bis 10000
Der Standardwert ist 0.
Pr6.28 (Blockverarbeitungsmodus)
PANATERM-Parameter: Special function selection
Wertebereich: 0 bis 1
Der Standardwert ist 0.
Wählen Sie 1: Blockverarbeitung gültig (Modbus)
Den Host-Controller konfigurieren
Ein neues Projekt in TIA Portal erstellen
Wenn Sie in TIA Portal ein neues Projekt erstellen, müssen Sie die verwendete SPS auswählen, das Kommunikationsboard hinzufügen und die IP-Adresse einstellen.
- Wählen Sie den SPS-Typ.
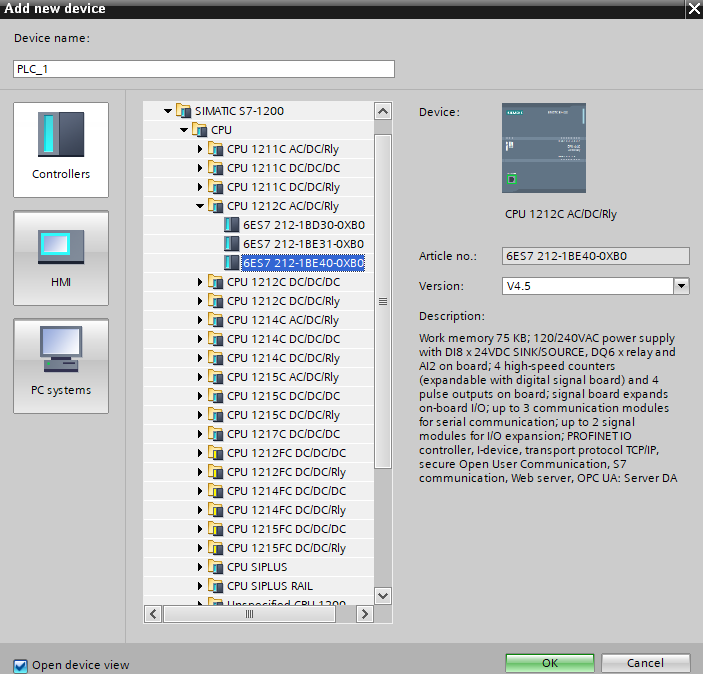
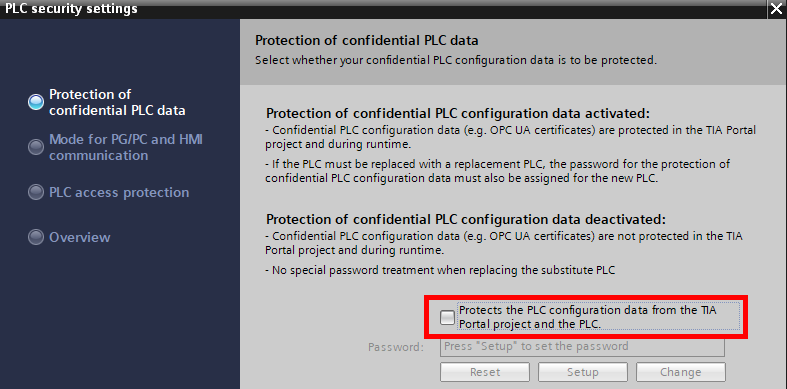
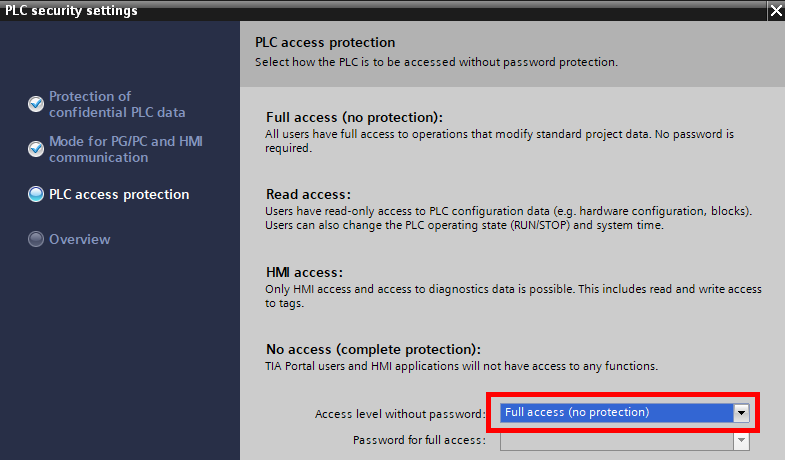
- Wählen Sie die Sicherheitseinstellungen. In diesem Beispiel wird kein Passwort gesetzt.
- Fügen Sie das für die Kommunikation über Modbus-RTU verwendete Kommunikationsboard hinzu.
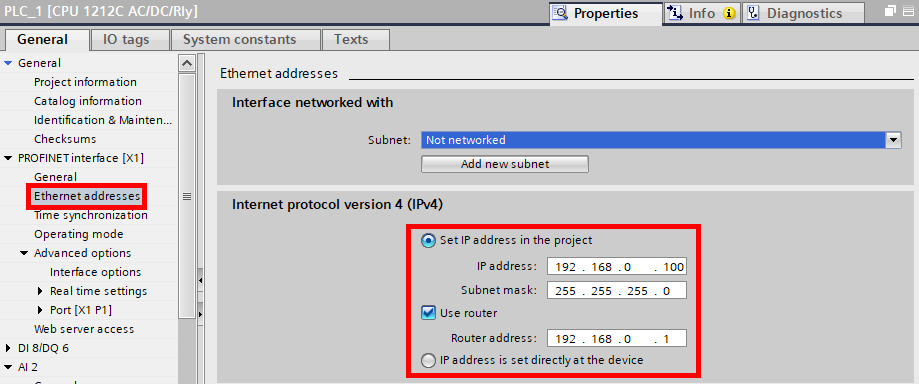
- Legen Sie die IP-Adresse der SPS fest. SPS und PC müssen sich im selben Netzwerk befinden.
Ein SPS-Programm erstellen
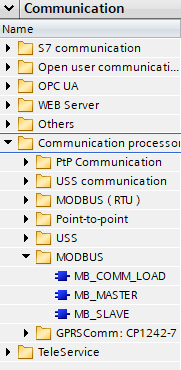
Öffnen Sie in der Taskcard Kommunikation unter Kommunikationsprozessor das Verzeichnis der MODBUS-Anweisungen. Fügen Sie MB_COMM_LOAD und MB_MASTER zum Programmblock Main hinzu.
MB_COMM_LOAD
Verwenden Sie die Anweisung MB_COMM_LOAD, für die Portkonfiguration des Modbus RTU-Kommunikationsboards.
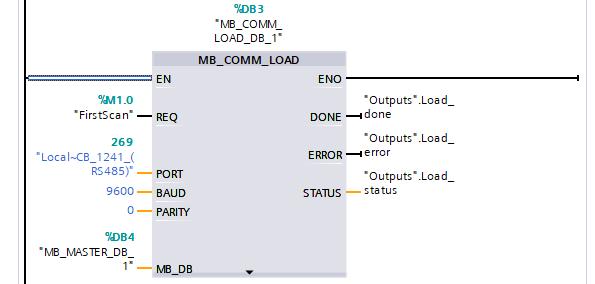
Eingang
- EN
Aktiviert den Befehl.
- REQ
Die Verarbeitung beginnt bei einer steigenden Flanke. Wir empfehlen, die Flankenerkennung im ersten Zyklus zuzulassen (Bit FirstScan).
- PORT
Stellen Sie den Port für die Kommunikation ein.
- BAUD
Legen Sie die Baudrate fest. Wählen Sie denselben Wert wie für die PANATERM-Einstellung Pr.5.30.
Werte:- 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 76800, 115200
- PARITY
Stellen Sie die Parität für die Kommunikation ein. Wählen Sie denselben Wert wie für die PANATERM-Einstellung Pr.5.38.
Werte:- 0: Keine
- 1: Ungerade
- 2: Gerade
- MB_DB
Geben Sie den Namen für die Anweisung MB_MASTER ein.
Ausgang
- ENO
TRUE, wenn die Funktion fehlerfrei ausgeführt wurde.
- DONE
TRUE für einen Zyklus, nachdem die letzte Anforderung fehlerfrei ausgeführt wurde.
- ERROR
TRUE für einen Zyklus, wenn nach der Ausführung der letzten Anforderung ein Fehler erkannt wurde.
- STATUS
Liefert den Fehlercode.
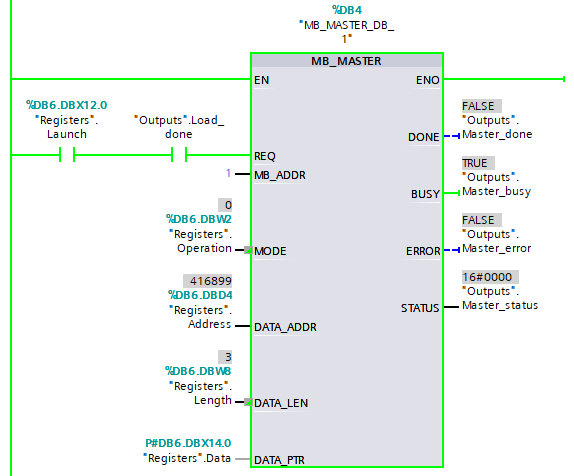
MB_MASTER
Verwenden Sie die Anweisung MB_MASTER, um Daten zum Modbus-RTU-Slave zu übertragen.
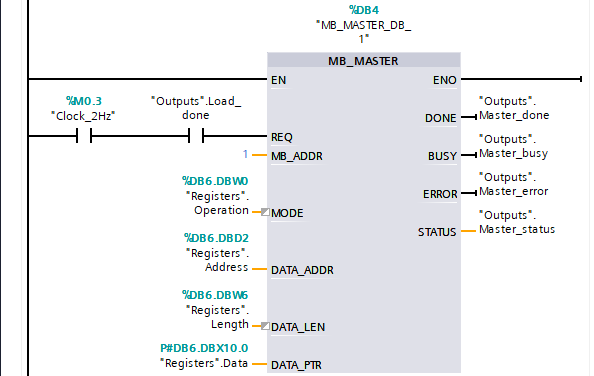
Eingang
- EN
Aktiviert den Befehl.
- REQ
Legen Sie die Parameter für die Datenübertragung zum Modbus-RTU-Slave fest. In diesem Beispiel wird die Konfigurationsanweisung MB_COMM_LD alle 0.5s ausgeführt.
- MB_ADDR
Stellen Sie die Slave-ID ein. Wählen Sie denselben Wert wie für die PANATERM-Einstellung Pr.5.31.
- MODE
Stellen Sie den Operationstyp ein.
Werte:- 0: Lesen
- 1: Schreiben
- DATA_ADDR
Legen Sie die Anfangsadresse der Daten im Slave fest, auf die zugegriffen werden soll. Alle gültigen Adressen sind in der Modbus-Funktionstabelle enthalten.
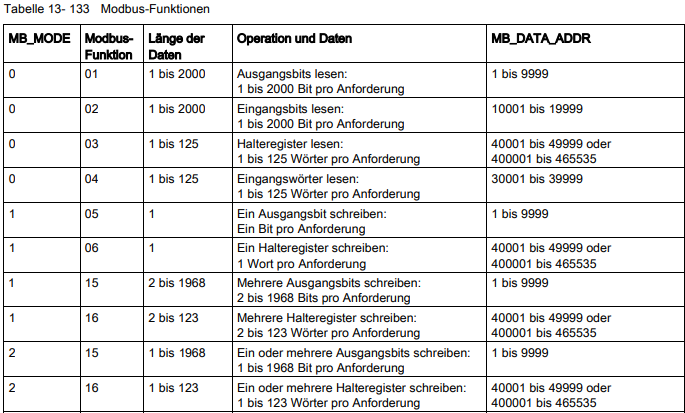
Quelle: S7-1200 Automatisierungssystem, Systemhandbuch, V4.2.3, 08/2018, A5E02486681-AL
AnmerkungZu der Modbus-Adresse, die im Handbuch Technical Reference - Modbus communication and block operation specification (SX-DSV03042) angegeben wird, muss 1 hinzugefügt werden.- DATA_LEN
Stellen Sie die Anzahl der Bits oder Worte fest, auf die zugegriffen werde soll. Alle gültigen Längenwerte sind in der Modbus-Funktionstabelle enthalten.
- DATA_PTR
Zeigt auf die Variable, die die zu lesenden Daten empfängt oder die zu schreibenden Daten enthält. Verwenden Sie ein Array, um mehrere Register zu lesen oder zu schreiben.
Ausgang
- ENO
TRUE, wenn die Funktion fehlerfrei ausgeführt wurde.
- DONE
TRUE für einen Zyklus, nachdem die letzte Anforderung fehlerfrei ausgeführt wurde.
- BUSY
- Werte:
- 0: Keine Operation aktiv
- 1: Operation aktiv
- ERROR
TRUE für einen Zyklus, wenn nach der Ausführung der letzten Anforderung ein Fehler erkannt wurde.
- STATUS
Liefert den Fehlercode.
Programmierbeispiele
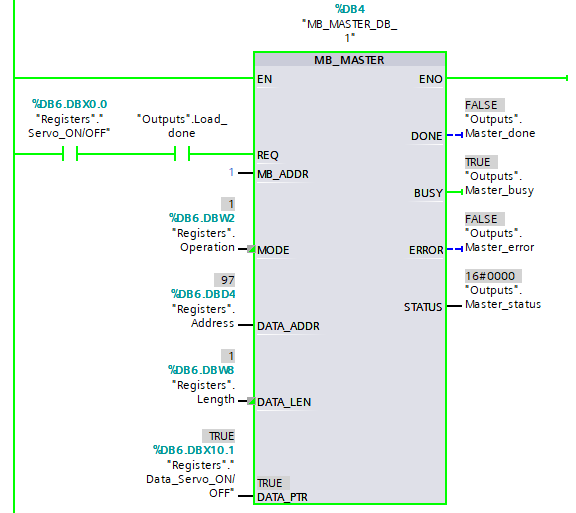
Servo ON - Servo OFF einstellen
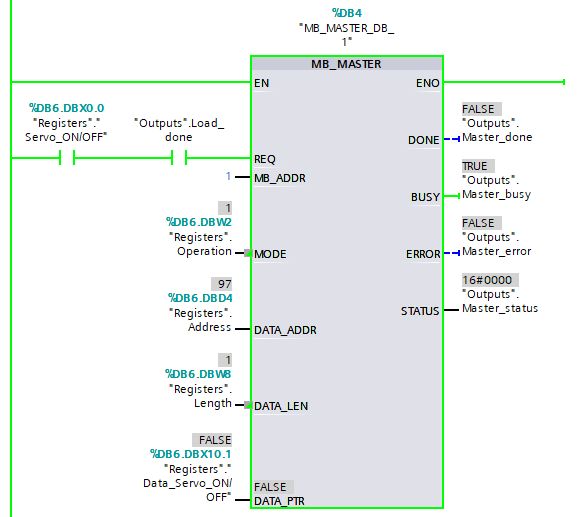
Um das Signal "Servo EIN“ zum Antriebsregler zu senden, geben Sie an DATA_ADDR die Modbus-Adresse für SERV-ON an und setzen DATA_PTR auf TRUE.
Für die Anforderung SERV-OFF wird DATA_PTR auf FALSE gesetzt.
Zu der Modbus-Adresse, die im Handbuch Technical Reference - Modbus communication and block operation specification (SX-DSV03042) angegeben wird, muss 1 hinzugefügt werden.
In diesem Beispiel legen wir an DATA_ADDR den Wert 97 (0060h = 96) an.

Quelle: Technical Reference - Modbus communication and block operation specification (SX-DSV03042)
Ein Blockbefehlsnummer angeben
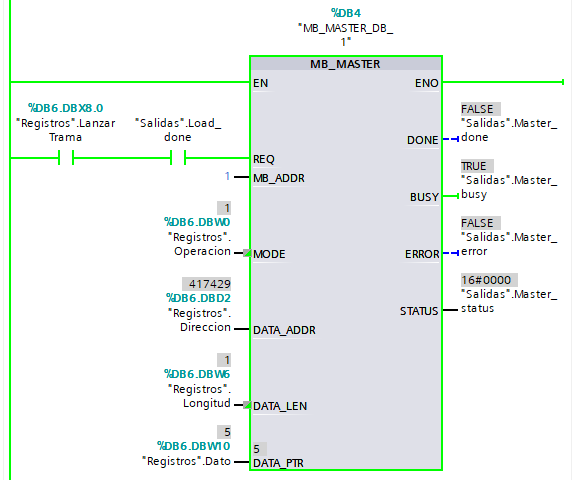
Für die Ausführung eines Blockbefehls, geben Sie die Modbus-Adresse für Blocknummern an DATA_ADDR und die Nummer des Blockbefehls an DATA_PTR an. In diesem Beispiel verwenden wir Blockbefehl Nummer 5.
Zu der Modbus-Adresse, die im Handbuch Technical Reference - Modbus communication and block operation specification (SX-DSV03042) angegeben wird, muss 1 hinzugefügt werden. Der Modbus-Adresse wird der Funktionscode 4 vorangestellt.
In diesem Beispiel legen wir an DATA_ADDR den Wert 417429 (4202h = 17428, Funktionscode = 4) an.

Quelle: Technical Reference - Modbus communication and block operation specification (SX-DSV03042)
Encoderposition lesen
Zum Lesen der Encoderposition wird an DATA_ADDR die Modbus-Adresse für Singleturn- oder Multiturn-Operationen angegeben. DATA_PTR zeigt auf die Datenbytes des Positionswerts.
Zu der Modbus-Adresse, die im Handbuch Technical Reference - Modbus communication and block operation specification (SX-DSV03042) angegeben wird, muss 1 hinzugefügt werden. Der Modbus-Adresse wird der Funktionscode 4 vorangestellt.
In diesem Beispiel legen wir an DATA_ADDR den Wert 416899 (4202h = 16898, Funkctionscode = 4) an.

Quelle: Technical Reference - Modbus communication and block operation specification (SX-DSV03042)