Velocity control
Before you start
Before operating this product, read the safety instructions in the related Operating Instructions.
This product is for industrial use only.
Electrical connections must be made by qualified electrical personnel.
About this document
Step-by-step instructions will guide you through connecting a PLC to a MINAS servo driver and setting the most important parameters in the PANATERM configuration software.
Available software
The following software is available free of charge.
-
This link will take you to the Panasonic Industry Co., Ltd. Web site.
Functional overview
Velocity control is a control mode to change the motor speed, for example to ensure certain speeds for a conveyor belt or a ball screw-driven machine. The speed is generally controlled by analog signals (e.g. 0 to 10V) at the analog input of the servo driver.
Example
An FP0RA21 analog output unit and a MINAS A6SF servo driver are connected using a DVOP4360V cable. An analog signal of 0 to 10V is sent from the unit to the servo driver. Additional signals, e.g. the servo ready or alarm status of the servo driver can be transmitted via the same cable to the PLC.

Wiring
Recommendations for wiring
It is the customer's responsibility to apply the countermeasures that they consider necessary to comply with current regulations on wiring, safety and reducing EMI.
Do not forget to meet the specifications indicated in the hardware manual for each of the devices being wired. If any specifications in the manual conflict with the information in this document, the manufacturer's manual takes preference.
For detailed information on reducing EMI, please refer to Recommendations for EMC-compliant wiring of servo drivers and motors.
Connectors of the servo driver
XA connector (main power connector)
Connect the power supply cable to the XA connector. For a 1-phase power supply of 230V, connect a 2-wire cable to the servo driver as illustrated. The L2 pin is not used in 1-phase mode.

XB connector (motor connector)
Connect the motor cable to the XB connector. The wires are labeled with the letters U, V, and W. Do not change the sequence of the motor phases, e.g. by connecting V to W.

X6 connector (encoder connector)
Connect the encoder cable to the X6 connector.

X4 connector (I/O connector)
Connect the connection cable to the X4 connector to the analog output unit.

X1 connector (USB connector for PC connection)
The servo driver is configured using the PANATERM configuration software . Use a commercially available USB A to mini-B cable to connect the PC to the servo driver.

Signal inputs and outputs of the X4 connector
For velocity control, the X4 connector of the MINAS A5/A6 servo driver is equipped with an analog input which has a resolution of 16 bits. The voltage range is 0V to +/-10V. The analog input is highlighted in the wiring diagram.
In our example, we will use the following signal inputs and outputs:
SRV-ON (pin 29)
Servo-on input to energize the servo motor.
COM+ (pin 7)
Common input for the power supply of the control signals.
SPR/TRQR/SPL (pins 14–15)
Analog speed command input.
S-RDY (pins 34–35)
Servo-ready output to indicate the ready state of the servo driver.
ALM (pins 36–37)
Servo-alarm output
Please refer to the Operating Instructions of your MINAS A5/A6 servo driver to learn more about the signal inputs and outputs which might be useful for your application.

PNP wiring of the X4 connector

NPN wiring of the X4 connector

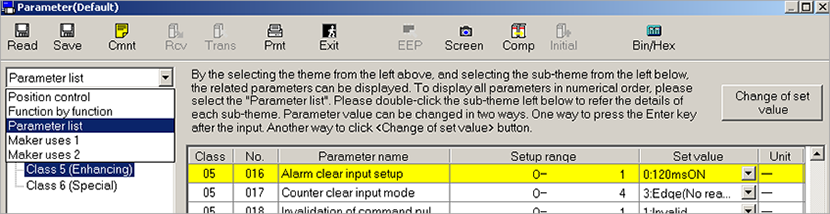
Make parameter settings in PANATERM
Use the PANATERM configuration software to configure the MINAS servo driver.
- Select the Parameter tab.
- Select the parameter list for your type of servo driver.
Basic parameters overview
The following table shows the setting range and description of the basic parameters.
Parameter |
Range |
Description |
|---|---|---|
Pr0.01 |
0 to 6 |
Control mode |
Pr3.00 |
0 to 3 |
Speed control mode |
Pr3.02 |
10 to 2000 [r/min/V] |
Input gain of speed command |
Pr3.03 |
0 to 1 |
Inversion of speed command input |
Pr3.12 |
0 to 10000 [ms/(1000r/min)] |
Acceleration time |
Pr3.13 |
0 to 10000 [ms/(1000r/min)] |
Deceleration time |
Pr4.22 |
-27888 to 27888 LSB (MINAS A5) -5578 to 5578 LSB (MINAS A6F) |
Analog input 1 offset |
Pr4.23 |
0.00 to 64.00 [ms] (MINAS A5, MINAS A6F) |
Analog input 1 filter |
Pr4.24 |
0.00 to 10.0 [V] |
Analog input 1 overvoltage |
Pr0.01 (Control mode)
PANATERM parameter: Control mode setting
Setting range: 0 to 6
The default value is 0: Position control
Select 1: Velocity control
Pr3.00 (Speed control mode)
PANATERM parameter: Inside/outside speed setting switching
Setting range: 0 to 3
The default value is 0: Analog speed command input (SPR)
Select 0: Analog speed command input (SPR). (The other settings apply for speed control by internal speed command.
Pr3.02 (Input gain of speed command)
PANATERM parameter: Speed command input gain
Setting range: 10 to 2000 [r/min/V]
The default value is 500 [r/min/V].
Set a gain factor for the motor speed based on the voltage applied at the speed command input SPR. For example, a setting value of 500r/min per 1V results in a speed of 3000r/min for an input voltage of 6V.
Pr3.03 (Inversion of speed command input)
PANATERM parameter: Speed command input inversion
Setting range: 0 to 1
- 0: No inversion, positive rotation direction for positive voltage
- 1: Inversion, positive rotation direction for negative voltage
The default value is 1.
Specify the polarity of the voltage applied to the analog input of the servo driver.
Pr3.12 (Acceleration time)
PANATERM parameter: Acceleration time setting
Setting range: 0 to 10000 [ms/(1000r/min)]
The default value is 0 [ms/(1000r/min)].
Specify the time from the initial speed to the target speed (acceleration time). For example, a setting value of 10 results in an acceleration time of 10ms for a target speed of 1000r/min.
Pr3.13 (Deceleration time)
PANATERM parameter: Deceleration time setting
Setting range: 0 to 10000 [ms/(1000r/min)]
The default value is 0 [ms/(1000r/min)].
Specify the time from the target speed to the initial speed (deceleration time). For example, a setting value of 10 results in a deceleration time of 10ms.
Pr4.22 (Analog input 1 offset)
PANATERM parameter: Analog input 1 (A|1) offset setting
- -27888 to 27888 LSB (MINAS A5)
- -5578 to 5578 LSB (MINAS A6F)
The default value is 0.
Specify an offset value to apply a torque on the motor shaft which compensates for drift.
Pr4.23 (Analog input 1 filter)
PANATERM parameter: Analog input 1 (A|1) filter setting
Setting range: 0.00 to 64.00 [ms]
The default value is 0.
This parameter acts like a low-pass filter to produce a stable voltage: the higher the setting value, the longer the delay.
Pr4.24 (Analog input 1 overvoltage)
PANATERM parameter: Analog input 1 (A|1) excessive setting
Setting range: 0.00 to 10.0 [V]
The default value is 0.0V.
Specify the maximum permissible overvoltage of analog input 1.
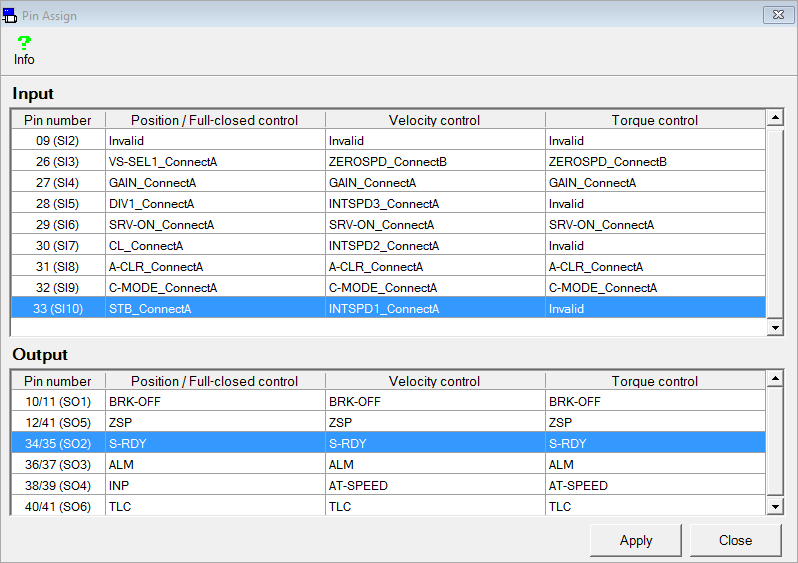
Make pin assignments in PANATERM
For some applications, the software function of physical pins of the servo driver must be changed. Use the PANATERM configuration software to make the pin assignment.
- Select .
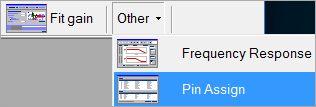
The current pin assignment is uploaded from the servo driver.
- Select an arbitrary input which is not required by your application and double-click.