PANATERM – Trial Run
Before you start
Before operating this product, read the safety instructions in the related Operating Instructions.
This product is for industrial use only.
Electrical connections must be made by qualified electrical personnel.
About this document
Step-by-step instructions will guide you through configuring a trial run for a MINAS servo driver in the PANATERM configuration software.
Available software
The following software is available free of charge.
-
This link will take you to the Panasonic Industry Co., Ltd. Web site.
Functional overview
With the PANATERM configuration software , you can manually move the servo motor without connecting an external control unit (PLC, CNC, encoder, etc.). This function lets you perform trial runs of your application and helps you to make mechanical adjustments to your machine.
|
|
|---|---|
|
Conduct trial runs of the servo motor only with the motor shaft disconnected from the machine to avoid any accident. |


General procedure for trial runs
In this example, we will configure a repetitive, continuous movement.
The general procedure includes the following steps:
Open the TrialRun tab in PANATERM.
Enable the servo function of the motor.
Make movement settings.
Make protective settings.
Start trial operation.
Trial run configuration
Open the TrialRun tab in PANATERM
The TrialRun tab is only available when a servo driver is connected to your PC.
- Select the TrialRun tab.
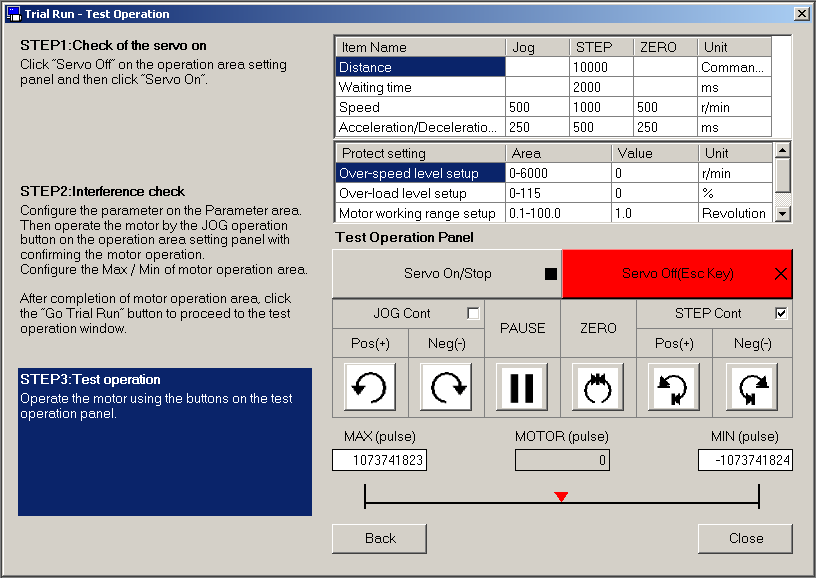
The Operation Area Setting dialog opens.

- (1) TrialRun tab
Enable the servo function of the motor
To set the servo driver parameters and to perform position control, the servo function of the motor must be enabled in PANATERM. Use the red and the grey servo buttons on the TrialRun tab to simulate the SRV_ON signal.
-
Select the red Servo Off(Esc Key) button to enable the servo on/off function.
Servo on/off function is disabled

-
Select the grey Servo On/Stop button to turn on the servo function.
Servo on/off function is enabled

When the servo function is turned on, you will hear a clicking sound from an internal relay. The parameters of the servo driver can now be adjusted and the axis is ready to perform position control.
MINAS LIQI: When the Servo On/Stop button has been selected, the LEDs on the servo drive change from “- -.“ to “P. c.” to indicate that the servo driver parameters can be adjusted via PC.
Change of LED display on MINAS LIQI
If an error occurs at this step, open the Alarm tab and eliminate the cause of the error. Clear the alarm and re-start from step 1.
Make movement settings
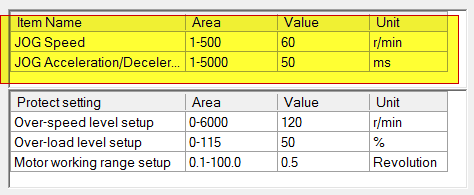
Make the movement settings in the parameter list on the TrialRun tab.
-
JOG speed: Motor speed in [r/min] for the movement started by the JOG buttons
JOG buttons for positive and negative rotation direction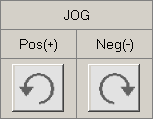
-
JOG acceleration/deceleration: Acceleration and deceleration time in [ms]
Make protective settings
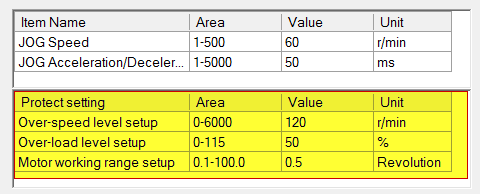
The protective settings in the bottom part of the TrialRun tab are directly linked to the servo driver parameters Pr5.12, Pr5.13, and Pr5.14. If you change a value on this tab, it will automatically be set in the driver.
-
Over-load level setup: Max. torque limit value in percent.
-
Auto-set (Over-speed level setup): Max. speed limit value in [r/min]. Select Auto-set (Over-speed level setup) to set a value twice the JOG speed.
-
Motor working range setup: Working range of the motor per revolution. The value is calculated based on the two previous values.
-
MAX (pulse), MIN (pulse): Use the JOG buttons to set limit values for the movement in positive and negative direction.
Maximum values for the movement in positive and in negative direction
- (1) Current value
If an error occurs, open the Alarm tab. You can find instructions on how to solve the issue on the right side of the tab under Treatment. In most cases, increasing the maximum value on the TrialRun tab or in the parameter list should solve the problem.

Start trial operation
After the servo function has been activated and all parameters have been set, you can start the trial run.
-
Select one of the JOG buttons for movement in positive or negative direction.
Test Operation dialog of the TrialRun tab