PANATERM – Ethernet over EtherCAT (EoE)
Prima di iniziare
Prima di utilizzare questo prodotto, leggere le istruzioni di sicurezza nei seguenti manuali:
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Descrizione
È possibile utilizzare un PC come host controller per creare la comunicazione Ethernet over EtherCAT (EoE) con un sistema di servoazionamentoMINAS A6 Multi. Le istruzioni passo a passo vi guideranno durante l'installazione del software TwinCAT 3 di Beckhoff per configurare la funzione EtherCAT sul vostro PC. Imparerete come collegare il software di configurazione per PC PANATERM con il sistema di servoazionamento MINAS A6 Multi tramite EtherCAT.
Software disponibile
Il seguente software è disponibile gratuitamente nell'area Download di Panasonic.
Il seguente software può essere scaricato dal sito web di Beckhoff (https://www.beckhoff.de):
Software TwinCAT3 Engineering (andare su )
Visione d'insieme delle funzioni
Un sistema di servoazionamento Panasonic MINAS A6 Multi comprende un modulo alimentatore, uno o più moduli azionamento da 400V e uno o due motori collegati a ciascun modulo azionamento. La comunicazione può essere realizzata tramite EtherCAT con qualsiasi host controller che supporti il protocollo applicativo CAN su EtherCAT (CoE).
Con il software TwinCAT 3 di Beckhoff è possibile configurare un PC come se fosse un host controller EtherCAT. Il software per configurazione PC PANATERM viene utilizzato per stabilire la comunicazione con il sistema di servoazionamento MINAS A6 Multi.
Esempio
Un sistema di servoazionamento composto da un modulo alimentatore da 15kW, un modulo azionamento a due assi taglia A da 1,5kW e due servomotori con una potenza nominale di 1,0kW e 1,5kW, viene collegato a un PV tramite un cavo Ethernet per permettere la comunicazione via EoE.
Utilizzare i seguenti accessori:
1 cavo di alimentazione da 400V AC: Collega il modulo alimentatore MINAS A6 Multi all'alimentazione principale (400V AC).
1 cavo di alimentazione da 24V DC: Collega l'alimentazione (24V DC) e l'host controller.
1 cavo di messa a terra (terminale a crimpare ad anello M4): Collega i morsetti di terra del modulo alimentatore e il modulo azionamento.
2 cavi del motore Panasonic: Collega il motore e il modulo azionamento.
2 cavi encoder Panasonic: Collega l'encoder e il modulo azionamento.
1 cavo Ethernet (RJ45): Collega il PC e il modulo azionamento.
1 cavo comunicazione RJ11 (2 spine RJ11): Collega il modulo alimentatore e il modulo azionamento.
1 barra alimentatore bus (50mm) con terminale per bus DC link (da535V DC a 675V DC): Collega il modulo alimentatore e il modulo azionamento.
1 barra alimentatore bus (50mm) con terminale per bus di controllo (24V DC): Collega il modulo alimentatore e il modulo azionamento.

- (1) Alimentazione (24V DC)
- (2) Modulo alimentatore MINAS A6 Multi (400V AC, 15kW)
- (3) Modulo azionamento a due assi MINAS A6 Multi (1,5kW)
- (4) Servomotore B (1,5kW) MINAS A6
- (5) Servomotore A (1kW) MINAS A6
- (6) PC con software TwinCAT 3 Engineering e PANATERM
Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Connettori lato inferiore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X102: Alimentazione principale (400V AC)
Collegare il cavo di alimentazione principale 400V AC a X102. Collegare i morsetti di terra del modulo alimentatore e del modulo azionamento tramite un cavo di messa a terra.
- (2)
X11: Alimentazione di controllo (24V DC)
Collegare l'alimentazione di controllo 24V DC a X11.
- (3)
X105A: Motore A, (4) X105B: Motore B
Collegare il cavo del motore per il servomotore A a X105A e il cavo del motore per il servomotore B a X105B.
- (4)
X9A: Encoder A, (6) X9B: Encoder B
Collegare il cavo dell'encoder A aX9A e il cavo del connettore B a X9B.
Connettori lato superiore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X1: Connettore per comunicazione interna sul modulo alimentatore,(2) X1A: Connettore per comunicazione interna sul modulo azionamento
Collegare X1 e X1A con il cavo di comunicazione RJ11.
- (3)
X6A: Connettore per comunicazione EtherCAT su modulo azionamento (non utilizzato in questo esempio)
Collegare un cavo Ethernet tra il PC e il connettore EtherCAT (X6A) del modulo azionamento.
Connettori lato anteriore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X7: Connettore USB (per configurazione azionamento) o modulo azionamento
Il modulo azionamento viene configurato utilizzando il software di configurazione PC PANATERM. Utilizzare un comune cavo da USB A a mini USB B per collegare il PC al modulo azionamento.
- (2)
X104: Connettori bus DC link su modulo alimentatore e modulo azionamento (da535V DC a 675V DC), (3) X12: Connettori bus di controllo (24V DC) su modulo alimentatore e modulo azionamento
Collegare le barre del bus a X104 e X12 per collegare i circuiti DC del modulo alimentatore e del modulo azionamento.
- (4)
Connettori per circuiti DC senza e con barre del bus
Impostare l'host controller
Impostare l'indirizzo IP nel proprio PC
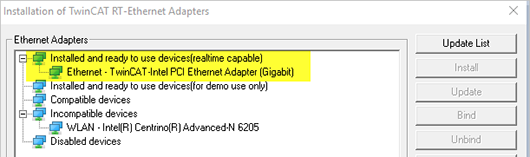
Controllare l'installazione del driver EtherCAT
- Assicurarsi che l'adattatore di rete Ethernet sia visualizzato in Installed and ready to use devices (realtime capable).
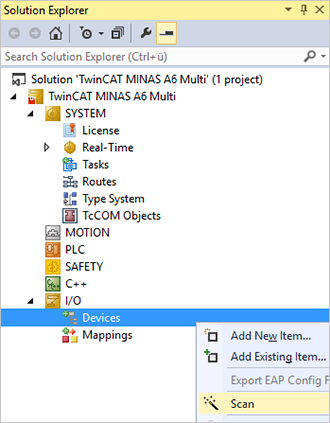
Aggiungere dispositivi connessi al proprio progetto
È necessario aggiungere i dispositivi connessi al vostro progetto TwinCAT.
- In Solution Explorer, andare su I/O e fare clic con il tasto destro del mouse su Devices. Selezionare Scan.
- Confermare il messaggio che riporta che non tutti i dispositivi possono essere trovati manualmente.
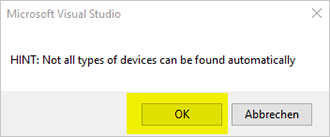
- Se il dispositivo master EtherCAT è stato trovato, selezionare OK.
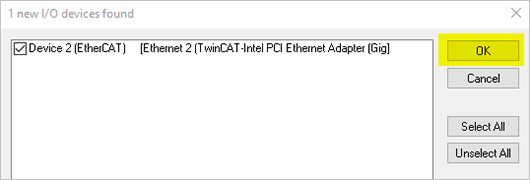
- Quando il modulo azionamento MINAS A6 Multi è stato trovato, compare il seguente messaggio, da confermare con OK.

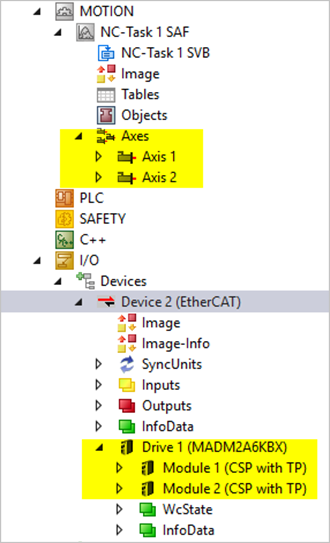
- Solution Explorer visualizza il modulo azionamento aggiunto con i due motori collegati in . Visualizza inoltre tutti gli assi trovati in .
Attivare la funzione EoE nel proprio progetto TwinCAT
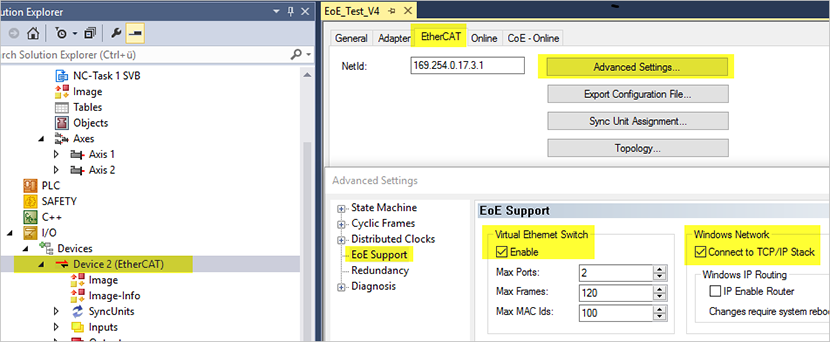
Eseguire le impostazioni per il master EtherCAT:
- Selezionare Connect to TCP/IP Stack in Windows Network.
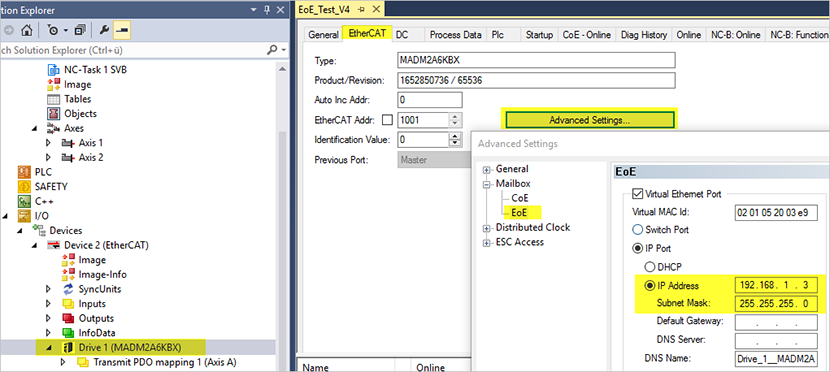
Eseguire le impostazioni per lo slave EtherCAT:
- Impostare l'indirizzo IP e la subnet mask nella sezione EoE. Assicurarsi che gli indirizzi IP del modulo azionamento MINAS A6 Multi e del PC siano nella stessa sottorete.
- Selezionare l'icona Activate Configuration dalla barra degli strumenti.

- Confermare il messaggio che indica che la nuova configurazione sarà attivata e le vecchie configurazioni saranno sovrascritte.
- Confermare il messaggio che indica che il sistema TwinCAT verrà riavviato in modalità RUN.
Il sistema TwinCAT è ora in modalità RUN e l'icona corrispondente è attiva.

(Per tornare alla modalità di configurazione, selezionare l'icona blu a destra dell'icona verde).
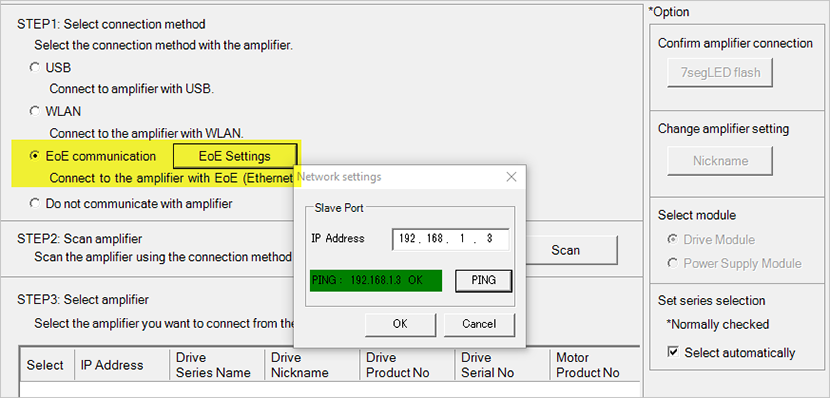
Collegare PANATERM tramite EoE
- Selezionare OK.
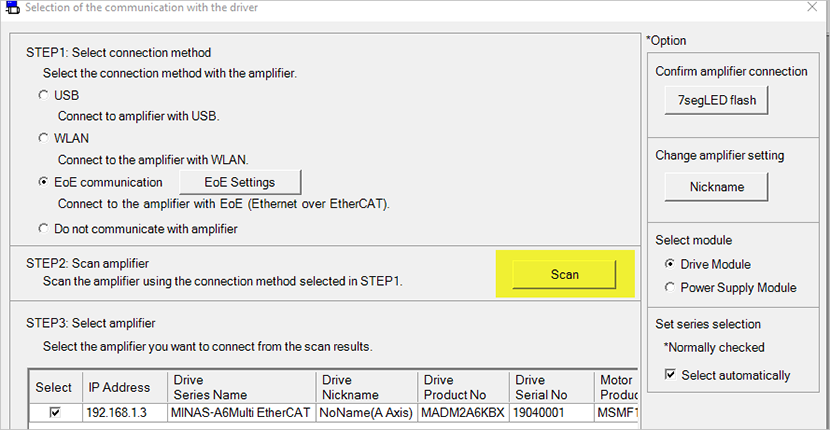
- Selezionare Scan per cercare il modulo azionamento. Selezionare poi il modulo azionamento e chiudere la finestra con OK.
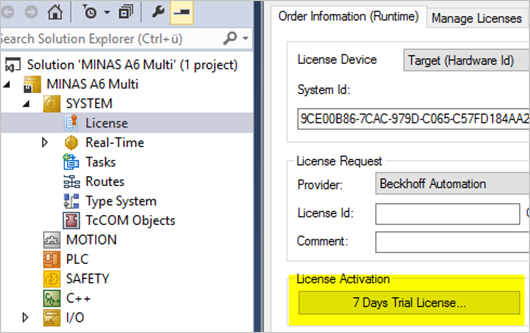
Attivare il software di licenza TwinCAT Runtime
Il software TwinCAT Runtime è gratuito per 7 giorni. La licenza di prova può essere rinnovata se necessario.
- Andare alla scheda Order Information (Runtime) e selezionare 7 Days Trial License.