PANATERM for Safety – Monitoraggio velocità sicura (SSM)
Prima di iniziare
Prima di utilizzare questo prodotto, leggere le istruzioni di sicurezza nei seguenti manuali:
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Descrizione
Le istruzioni passo a passo vi guideranno attraverso la configurazione e la programmazione della funzione di Monitoraggio velocità sicura (SSM) con il software di programmazione PANATERM for Safety.
Software disponibile
Il seguente software è disponibile gratuitamente nell'area Download di Panasonic.
Visione d'insieme delle funzioni
Utilizzare la funzione di monitoraggio dell'arresto sicuro (SSM) per monitorare la velocità dell'azionamento e per emettere un segnale quando la velocità scende al di sotto di una determinata soglia.
Utilizzare il software di programmazione PANATERM for Safety per impostare questa funzione per il sistema di servoazionamento MINAS A6 Multi.

- (1) Abilitato
- (2) Risultato
[t0, t1[ |
La velocità è superiore alla soglia parametrizzata. Il risultato SSM è "0" |
[t1, t2[ |
La velocità è inferiore alla soglia parametrizzata. Il risultato SSM è "1" |
[t2, t3[ |
La velocità è superiore alla soglia parametrizzata. Il risultato SSM è nuovamente "0" |
[t3, t4[ |
La velocità è inferiore alla soglia parametrizzata. Il risultato SSM è nuovamente "1" |
Esempio
Un sistema di servoazionamento composto da un modulo alimentatore da 15kW, un modulo azionamento a due assi taglia A da 1,5kW e due servomotori da 1,0kW e 1,5kW viene collegato a un PC tramite un cavo USB.
Utilizzare i seguenti accessori:
1 cavo di alimentazione da 400V AC: Collega il modulo alimentatore MINAS A6 Multi all'alimentazione principale (400V AC).
1 cavo di alimentazione da 24V DC: Collega l'alimentazione (24V DC) e l'host controller.
1 cavo di messa a terra (terminale a crimpare ad anello M4): Collega i morsetti di terra del modulo alimentatore e il modulo azionamento.
2 cavi del motore Panasonic: Collega il motore e il modulo azionamento.
2 cavi encoder Panasonic: Collega l'encoder e il modulo azionamento.
1 cavo comunicazione RJ11 (2 spine RJ11): Collega il modulo alimentatore e il modulo azionamento.
1 barra alimentatore bus (50mm) con terminale per bus DC link (da535V DC a 675V DC): Collega il modulo alimentatore e il modulo azionamento.
1 barra alimentatore bus (50mm) con terminale per bus di controllo (24V DC): Collega il modulo alimentatore e il modulo azionamento.
1 chiavetta USB di licenza
1 cavo USB

- (1) Alimentazione (24V DC)
- (2) Modulo alimentatore MINAS A6 Multi (400V AC, 15kW)
- (3) Modulo azionamento a due assi MINAS A6 Multi (1,5kW)
- (4) Cavo USB tra PC e modulo azionamento
- (5) Servomotore B (1,5kW) MINAS A6
- (6) Servomotore A (1kW) MINAS A6
- (7) Chiavetta USB di licenza per PANATERM for Safety
- (8) PC con PANATERM for Safety
Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Connettori lato inferiore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X102: Alimentazione principale (400V AC)
Collegare il cavo di alimentazione principale 400V AC a X102. Collegare i morsetti di terra del modulo alimentatore e del modulo azionamento tramite un cavo di messa a terra.
- (2)
X11: Alimentazione di controllo (24V DC)
Collegare l'alimentazione di controllo 24V DC a X11.
- (3)
X105A: Motore A, (4) X105B: Motore B
Collegare il cavo del motore per il servomotore A a X105A e il cavo del motore per il servomotore B a X105B.
- (4)
X9A: Encoder A, (6) X9B: Encoder B
Collegare il cavo dell'encoder A aX9A e il cavo del connettore B a X9B.
Connettori lato superiore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X1: Connettore per comunicazione interna sul modulo alimentatore,(2) X1A: Connettore per comunicazione interna sul modulo azionamento
Collegare X1 e X1A con il cavo di comunicazione RJ11.
- (3)
X6A: Connettore per comunicazione EtherCAT su modulo azionamento (non utilizzato in questo esempio)
Connettori lato anteriore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X7: Connettore USB (per configurazione azionamento) o modulo azionamento
Il modulo azionamento viene configurato utilizzando il software di configurazione PC PANATERM. Utilizzare un comune cavo da USB A a mini USB B per collegare il PC al modulo azionamento.
- (2)
X104: Connettori bus DC link su modulo alimentatore e modulo azionamento (da535V DC a 675V DC), (3) X12: Connettori bus di controllo (24V DC) su modulo alimentatore e modulo azionamento
Collegare le barre del bus a X104 e X12 per collegare i circuiti DC del modulo alimentatore e del modulo azionamento.
- (4)
Connettori per circuiti DC senza e con barre del bus
Chiavetta USB di licenza
Per compilare e scaricare la configurazione di sicurezza funzionale sul modulo azionamento è necessaria una chiavetta USB di licenza. Collegare la chiavetta di licenza a una porta USB del proprio PC.
Chiavetta USB di licenza
Collegare il PC e il modulo azionamento
Collegare il PC e il modulo azionamento con un cavo Ethernet o con un cavo USB. In questo esempio utilizziamo un cavo USB collegato al X8 del modulo azionamento.
X8 (per configurazione della sicurezza funzionale)
ConnettoreUtilizzare un comune cavo da USB A a mini USB B per collegare il PC al modulo azionamento.

- (1) X8: Connettore USB su modulo azionamento
Configurazione di sicurezza funzionale
Installare PANATERM for Safety sul proprio PC
Installare il software sul PC.
Per i dettagli, fare riferimento a Manuale di Programmazione – PANATERM for Safety SX-DSV03508.
Creare un programma di sicurezza
Il flusso di lavoro generale per creare un programma di sicurezza prevede di aggiungere i dispositivi del proprio sistema di servoazionamento al progetto, collocarli nella schermata Terminal Scheme e configurare le funzionale legate alla sicurezza nella schermata Schema funzionale.
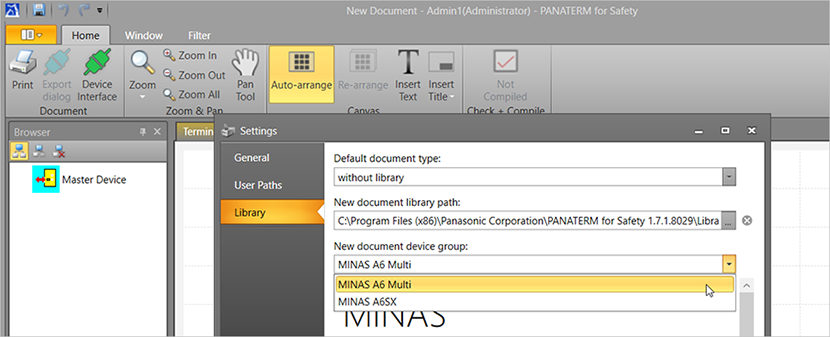
- Selezionate la scheda Settings.

- Selezionare Library e poi MINAS A6 Multi in New document device group.
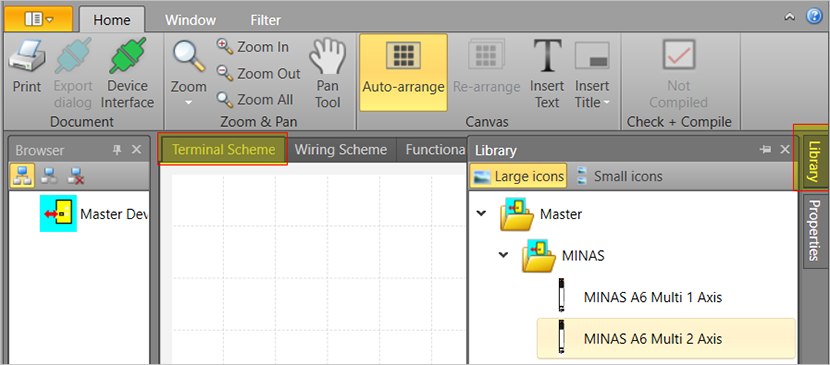
- Selezionare MINAS A6 Multi 2 Axis dalla finestra Libreria e trascinare l'elemento nella finestra Terminal Scheme.
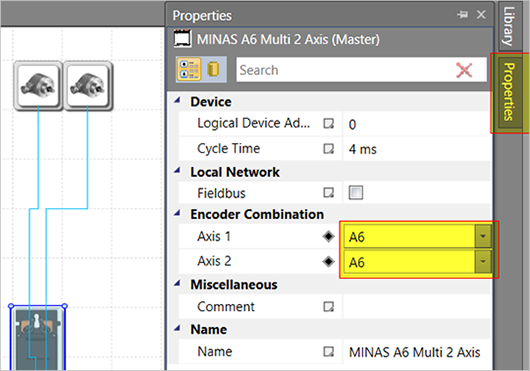
- Andare alla finestra Properties e selezionare l'encoder A6 per entrambi gli assi.
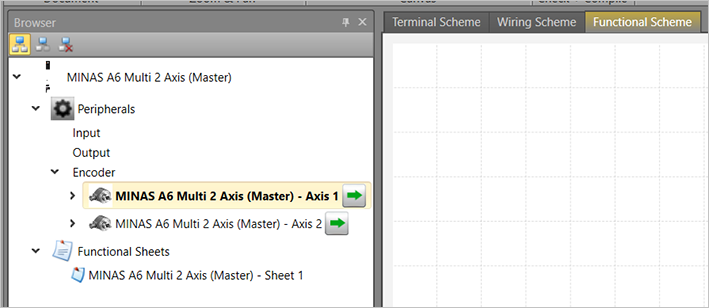
- Selezionare gli elementi dell'encoder nella finestra Browser e trascinarli nella finestra Schema funzionale.
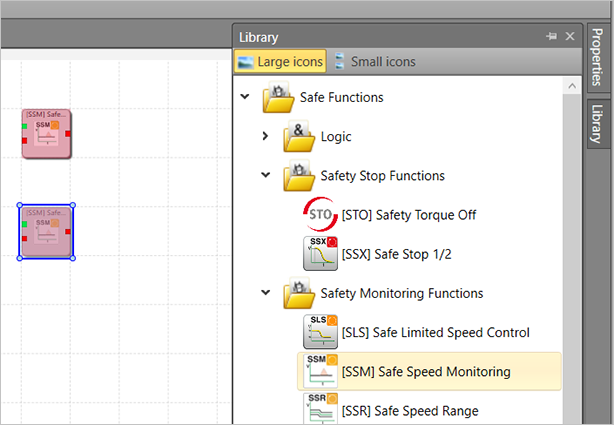
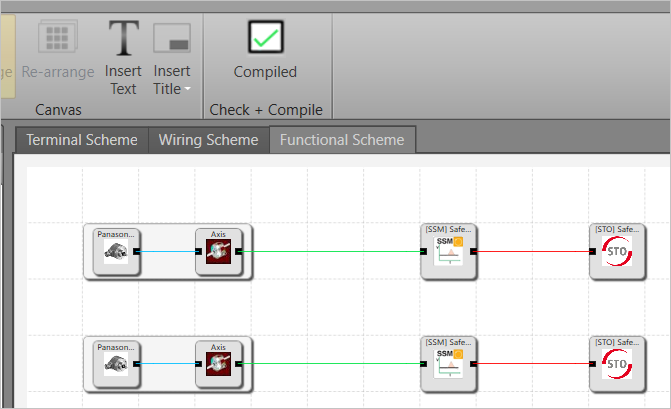
- Selezionare la funzione legata alla sicurezza [SSM] Safe Speed Monitoring dalla finestra Libreria e trascinarla nella finestra Schema funzionale. Per due assi, la funzione serve per due volte.
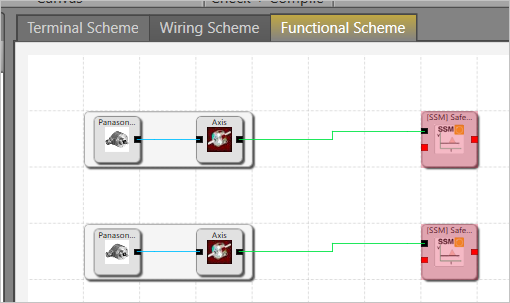
- Utilizzare il mouse per collegare gli elementi.
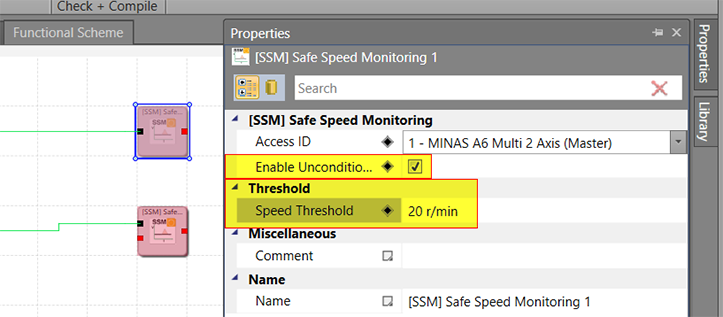
- Selezionare la funzione [SSM] nella finestra Terminal Scheme ed eseguire le funzioni nella finestra Proprietà come mostrato nello screenshot.Il valore di soglia per la velocità è un valore campione che può essere regolato in base alle esigenze della macchina.
- Selezionare Check + Compile nella barra multifunzione per compilare il progetto
Scaricare il programma di sicurezza sul modulo azionamento
Si ricorda che è necessario possedere una chiavetta USB di licenza per compilare e salvare il programma.
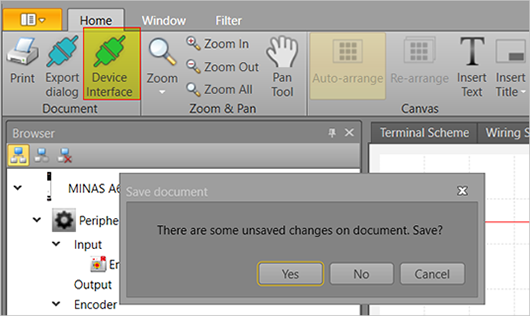
- Selezionare Device Interface nella barra multifunzione e salvare il progetto.
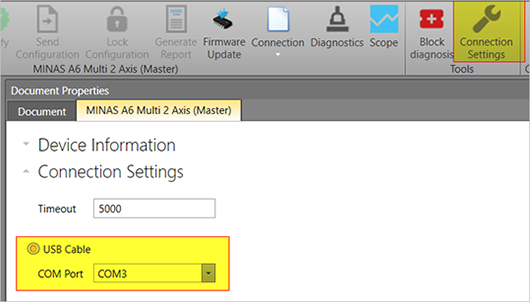
- Selezionare Connection Settings nella barra multifunzione e poi USB Cable.
- Selezionare Connect nella barra multifunzione.

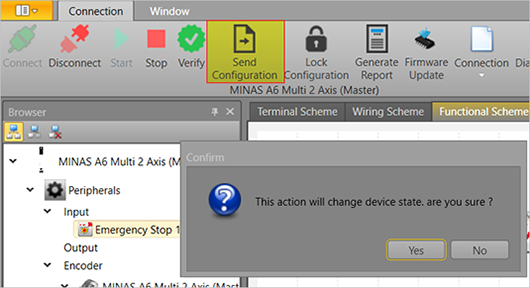
- Selezionare Send Configuration nella barra multifunzione.Selezionare Yes per confermare il messaggio relativo al fatto che tale azione modificherà lo stato del dispositivo.
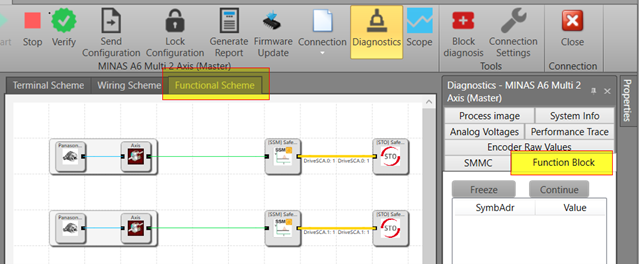
- Per controllare lo stato attuale della funzione legata alla sicurezza, andare su Diagnostics e selezionare la finestra Functional Scheme.Una linea gialla indica che l'interruttore di emergenza non è stato ancora premuto. Se è rossa, l'interruttore di emergenza è stato premuto e la STO è attiva.
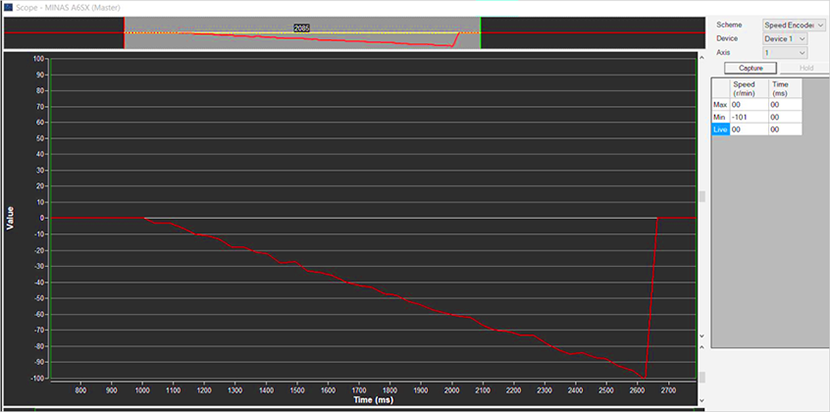
Monitorare il comportamento della funzione legata alla sicurezza SSM
È possibile regolare i valori di soglia impostati nella finestra Properties in base alle proprie necessità. Per i dettagli, fare riferimento a SX-DSV03508, MINAS A6 Multi, Manuale di Programmazione – PANATERM for Safety.