Controllo di posizione con block operation utilizzando segnali
Prima di iniziare
Prima di mettere in esercizio questo prodotto leggete le istruzioni di sicurezza contenute nel rispettivo Operating Instructions della serie MINAS.
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Informazioni su questo documento
Istruzioni passo dopo passo vi spiegano il collegamento di un PLC ad un servoazionamento MINAS e l'impostazione dei parametri più importanti nel software di configurazione PANATERM.
Software disponibile
Il seguente software è disponibile gratuitamente:
-
Questo collegamento porta al sito Web di Panasonic Industry Co., Ltd.
Control FPWIN Pro7 software di programmazione (versione base)
Questo collegamento porta all'InfoHub di Control FPWIN Pro7.
Visione d'insieme delle funzioni
Il controllo di posizione è una modalità di controllo nella quale il motore muove il carico in una posizione target stabilita.
Il servoazionamento può essere controllato da un treno di impulsi nel campo di frequenze fra 1Hz e 8MHz da un host controller come un PLC o un controllore CNC o attraverso block operation. Nella block operation l'utente definisce i parametri di posizionamento con block command. Il servoazionamento MINAS A6 ha una capacità di memoria block di 256 block command. Tutti i block command sono salvati nel servoazionamento in una tabella block operation.
Potete specificare i block command con il software di configurazione PANATERM oppure con comandi Modbus se usate un PLC con una porta Modbus RTU. I block command sono avviati tramite segnali digitali di un PLC (p.es. STB, da B-SEL1 a B-SEL128), tramite un interruttore trigger o tramite comandi Modbus.
Esempio
Per comandare il servoazionamento con segnali I/O si collega un PLC FP0H a un servoazionamento MINAS A6SF. Se occorre possono essere trasmessi ulteriori segnali come servo-ready, allarme o posizione raggiunta.

- (1) Connessione ad alimentazione esterna
- (2) Connessione a finecorsa
Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Connettori del servoazionamento
Connettore XA (connettore di alimentazione)
Collegate il cavo di alimentazione al connettore XA. Per un'alimentazione monofase di 230V collegare al servoazionamento un cavo a due conduttori come illustrato. Nella modalità monofase non occorre il pin L2.

Connettore XB (connettore motore)
Collegate il cavo del motore al connettore XB. I conduttori sono indicati dalle lettere U, V e W. Non cambiate l'ordine delle fasi del motore collegando per esempio V a W.

Connettore X6 (connettore encoder)
Collegate il cavo encoder al connettore X6.

Connettore X4 (connettore I/O)
Collegate il cavo di collegamento al connettore X4 e al PLC FP0H. Per collegamenti PNP è disponibile il cavo di collegamento preassemblato DV0P0988WP-1.
Panasonic fornisce diversi cavi di collegamento preassemblati per collegare altri tipi di PLC.

- (1) Connessione ad alimentazione esterna
- (2) Connessione a finecorsa
Connettore X1 (connettore USB per collegamento al PC)
Il servoazionamento è configurato con il software di configurazione PANATERM. Per collegare il PC al servoazionamento usate un cavo USB A a mini USB B commerciale.

Ingressi e uscite segnale del connettore X4
Per il controllo di posizione, il connettore X4 del servoazionamento MINAS A5/A6 è dotato di ingressi e uscite segnale.
Il cablaggio dell'ingresso treno impulsi dipende dalla vostra fonte di impulsi (PLC, CNC o servoazionamento):
- Per uscite open collector di un PLC con una frequenza massima di 200kHz e un livello tensione impulsi massimo di 24V avete due possibilità:
Con un resistore esterno (alimentazione a 12V o 24V): pin 3, 4, 5, 6
Senza un resistore esterno (solo alimentazione a 24V): pin 1, 2, 4, 6.
Per uscite Line driver con una frequenza massima di 500kHz, usate i pin 3, 4, 5, 6.
Per uscite Line driver con una frequenza massima di 8MHz, usate i pin 44, 45, 46, 47.
Nel nostro esempio usiamo gli ingressi e le uscite segnale seguenti:
SRV-ON (pin 29)
Ingresso servo ON per alimentare il servomotore.
COM+ (pin 7)
Comune per l'alimentazione dei segnali di comando.
STB (il numero di pin deve essere assegnato in PANATERM)
Ingresso di strobe per avviare la block operation.
da B-SEL1 a B-SEL128 (i numeri di pin devono essere assegnati in PANATERM)
Ingressi block number per la scelta dei block command.
S-RDY (pin 34–35)
Uscita servo-ready per indicare lo stato Pronto del servoazionamento.
ALM (pin 36–37)
Uscita allarme servo
INP (pin 38–39)
Uscita posizione raggiunta che va su on quando è stata raggiunta la posizione target.
Per ulteriori particolari su ingressi e uscite segnale utili per la vostra applicazione, vi preghiamo di consultare il Manuale di istruzioni del vostro servoazionamento MINAS A5/A6.

Cablaggio PNP del connettore X4

Cablaggio NPN del connettore X4

Impostare parametri in PANATERM
Usate il software di configurazione PANATERM per configurare il servoazionamento MINAS.
- Selezionate la scheda Parameter.
- Selezionate la lista di parametri per il vostro tipo di servoazionamento.
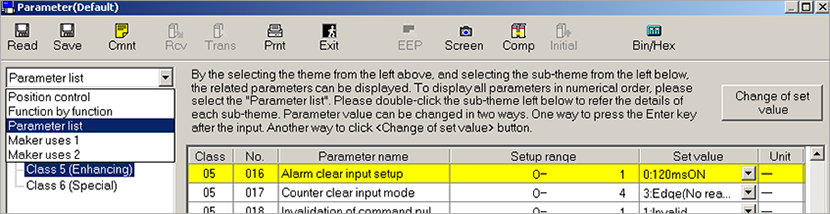
Visione d'insieme dei parametri basilari
La seguente tabella riporta il campo di valori e la descrizione dei parametri basilari.
Parametro |
Campo |
Descrizione |
|---|---|---|
Pr0.00 |
0 o 1 |
Direzione di rotazione del motore |
Pr0.01 |
da 0 a 6 |
Modalità di controllo |
Pr6.28 |
da 0 a 2 |
Modalità block operation |
Pr0.00 (Direzione di rotazione del motore)
Parametro PANATERM: Rotational direction setting
Campo di valori: 0 o 1
Il valore di default è 1: CCW (rotazione in senso antiorario)
Pr0.01 (Modalità di controllo
Parametro PANATERM: Control mode setting
Campo di valori: da 0 a 6
Il valore di default è 0: Controllo di posizione
Selezionate 0: Controllo di posizione (la modalità block operation supporta solo il controllo di posizione)
Pr6.28 (Modalità block operation)
Parametro PANATERM: Special function selection
Campo di valori: da 0 a 2
Il valore di default è 0: block operation non valida
Selezionate 2: block operation valida (ingresso segnale)
Modificare l'assegnazione dei pin in PANATERM
Per alcune applicazioni si deve cambiare la funzione software dei pin fisici del servoazionamento. Usate il software di configurazione PANATERM per modificare l'assegnazione dei pin.
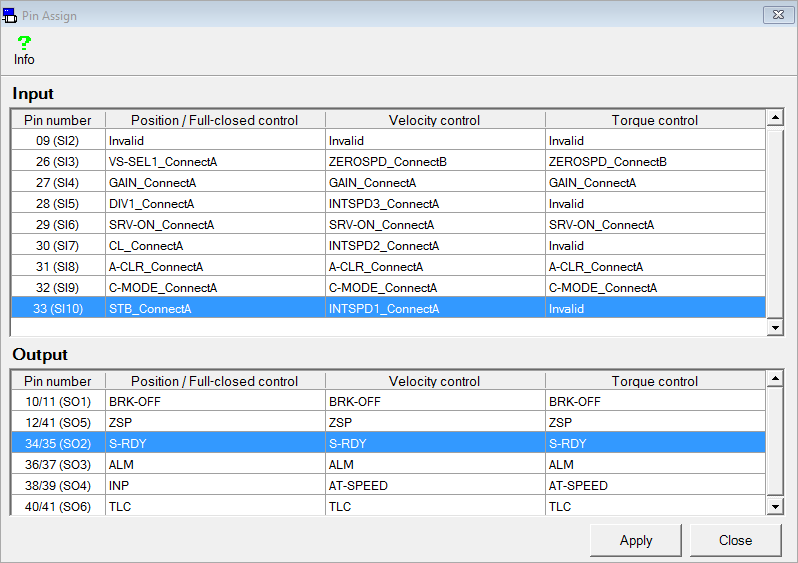
In questo esempio deve essere assegnato ad un pin di ingresso solo il segnale STB.
- Selezionate .
L'assegnazione dei pin attuale viene caricata dal servoazionamento.
- Selezionate un qualsiasi ingresso non richiesto dalla vostra applicazione e fate doppio clic.
In questo esempio fate doppio clic sulla riga del pin numero 33.
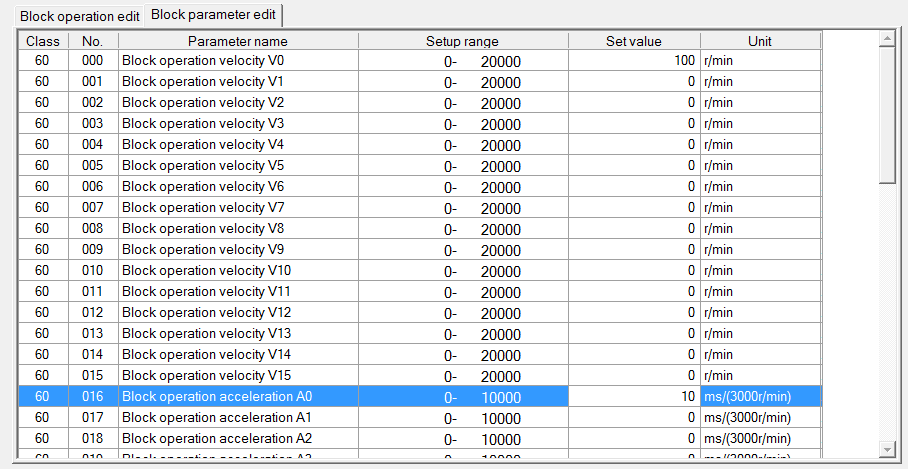
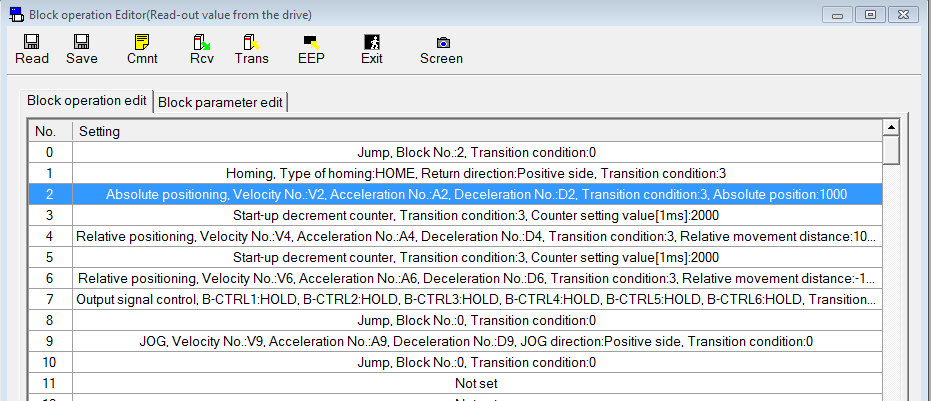
Inserire block command in PANATERM
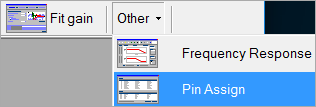
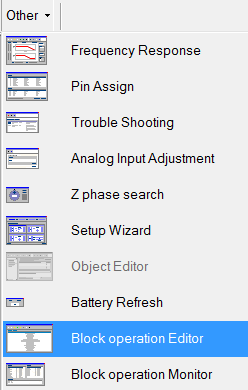
Per inserire block command dovete avviare l'editor di block operation.
- Selezionate .
- Selezionate il comando desiderato (p.es. JOG) e selezionate OK.
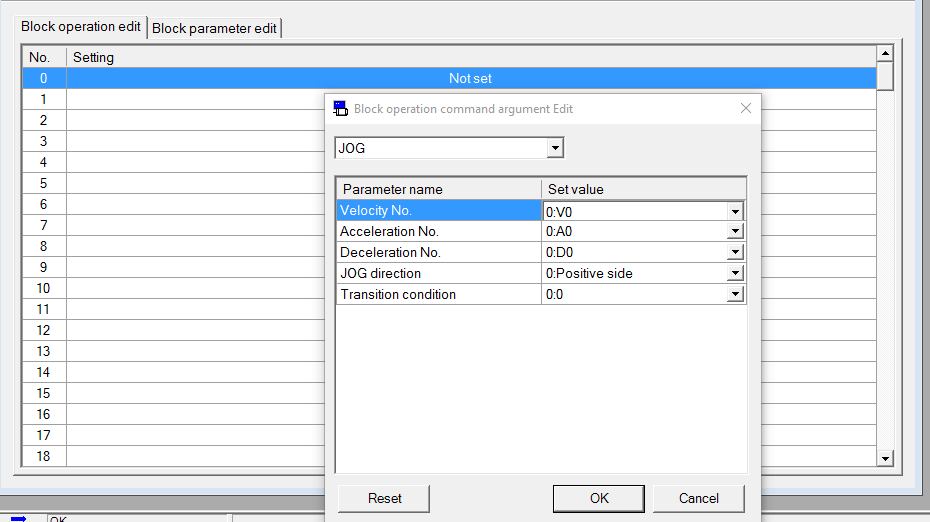
- Selezionate la scheda Block parameter edit per inserire i valori desiderati per velocità, accelerazione, decelerazione, ecc.