Controllo di posizione in reti EtherCAT
Prima di iniziare
Prima di mettere in esercizio questo prodotto leggete le istruzioni di sicurezza contenute nel rispettivo Operating Instructions della serie MINAS.
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Informazioni su questo documento
Istruzioni passo dopo passo vi spiegano il collegamento di un'unità EtherCAT FP7 ad un servoazionamento MINAS.
Software disponibile
Il seguente software è disponibile gratuitamente.
-
Questo collegamento porta al sito Web di Panasonic Industry Co., Ltd.
Tool Control Motion Integrator
Potete scaricare una versione di valutazione. Trascorso il periodo di valutazione di 60 giorni occorre un adattatore.
Control FPWIN Pro7 software di programmazione (versione base)
-
Questa libreria è stata sviluppata per il modulo FP7 EtherCAT ed offre funzioni e blocchi funzione utili per compiti di posizionamento di base.
Visione d'insieme delle funzioni
Il controllo di posizione è una modalità di controllo nella quale il motore muove il carico in una posizione target stabilita.
Questo servoazionamento può essere controllato tramite EtherCAT da ogni host controller che supporta la comunicazione EtherCAT. Questa Guida rapida spiega come cablare e configurare il servoazionamento e l'host controller per la messa in esercizio del sistema.
Per configurare l'unità EtherCAT FP7 usate il tool Control Motion Integrator.
Esempio
Lo host controller è un'unità EtherCAT FP7. È collegato ad un servoazionamento a MINAS A6B da un cavo EtherCAT.

- (1) Servoazionamento MINAS A6B
- (2) Carico da muovere
- (3) Alimentazione 24V DC
- (4) Cavo EtherCAT
- (5) PLC FP7 e unità EtherCAT
Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Connettori del servoazionamento
Connettore XA (connettore di alimentazione)
Collegate il cavo di alimentazione al connettore XA. Per un'alimentazione monofase di 230V collegare al servoazionamento un cavo a due conduttori come illustrato. Nella modalità monofase non occorre il pin L2.

Connettore XB (connettore motore)
Collegate il cavo del motore al connettore XB. I conduttori sono indicati dalle lettere U, V e W. Non cambiate l'ordine delle fasi del motore collegando per esempio V a W.

Connettore X6 (connettore encoder)
Collegate il cavo encoder al connettore X6.

Connettore X1 (connettore USB per collegamento al PC)
Il servoazionamento è configurato con il software di configurazione PANATERM. Per collegare il PC al servoazionamento usate un cavo USB A a mini USB B commerciale.

Connettore X2A (connettore EtherCAT)
Collegate un cavo Ethernet al connettore X2A del servoazionamento MINAS A6B e alla porta EtherCAT dell'unità EtherCAT FP7.
Collegate l'unità EtherCAT FP7 ad un'alimentazione a 24V DC.


Impostare parametri in PANATERM
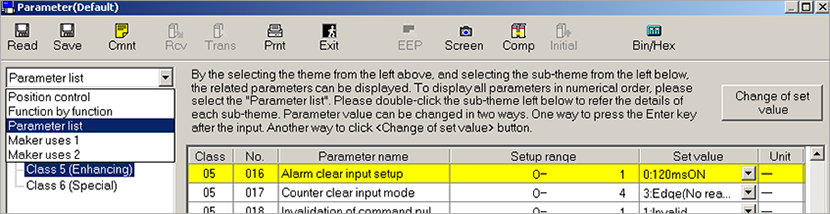
Usate il software di configurazione PANATERM per configurare il servoazionamento MINAS.
- Selezionate la scheda Parameter.
- Selezionate la lista di parametri per il vostro tipo di servoazionamento.
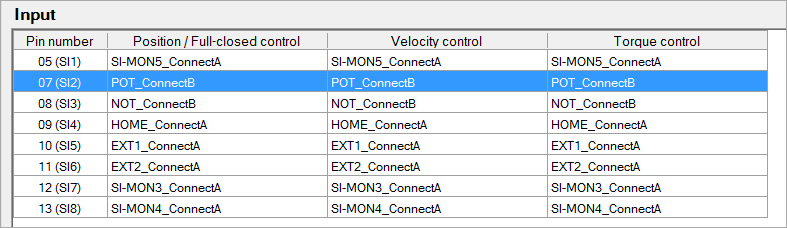
Modificare l'assegnazione dei pin in PANATERM
Se si utilizza un'unità EtherCAT FP7, gli ingressi di finecorsa POT e NOT non possono essere assegnati ai pin 07 e 08. (Se avete bisogno di questi finecorsa, fate riferimento al manuale FP7 Motion Control Unit User's Manual.)
- Selezionate .
L'assegnazione dei pin attuale viene caricata dal servoazionamento.
- Fate doppio clic sulle righe dei pin numero 07 (SI2) e 08 (SI3).
Impostare parametri in Control Motion Integrator
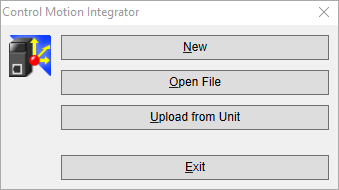
Per configurare l'unità EtherCAT FP7 usate il tool Control Motion Integrator. Il software può essere avviato come prodotto stand-alone o all'interno del software di programmazione Control FPWIN Pro 7. In questo esempio usiamo la versione stand-alone. Per informazioni sull'impiego del tool in Control FPWIN Pro 7 consultate l'Help online della libreria MC_EtherCAT_Library.
Trascorso il periodo di valutazione di 60 giorni per il tool Control Motion Integrator, per poter cambiare le impostazioni di comunicazione EtherCAT dovete collegare al vostro PC un adattatore hardware.
- Selezionare New.
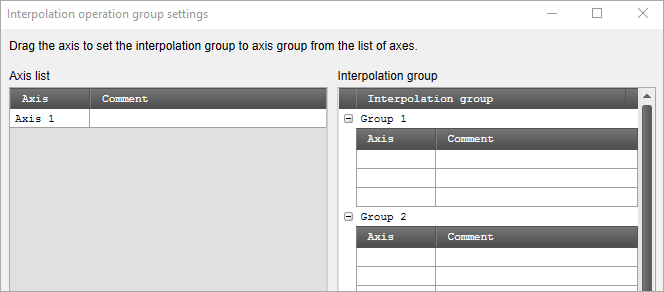
- Selezionate l'unità e il numero degli assi collegati. Nel nostro esempio è solo un asse.
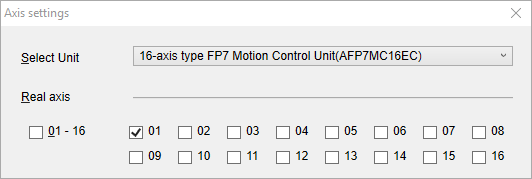
- In questo esempio non c'è interpolazione perché c'è solo un asse. Selezionare OK.
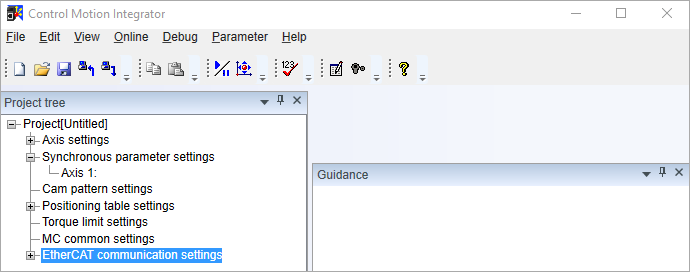
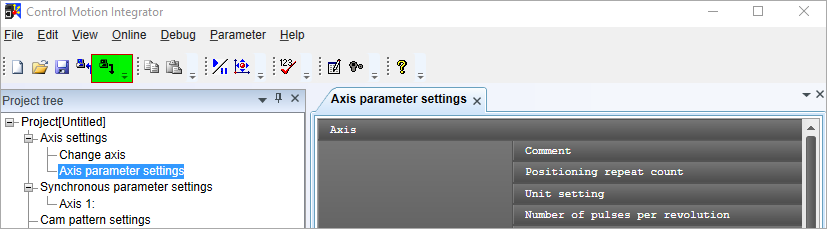
- Fate doppio clic su EtherCAT communication settings per cercare assi collegati.
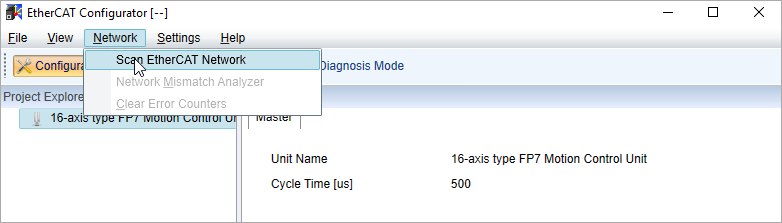
- Selezionate .
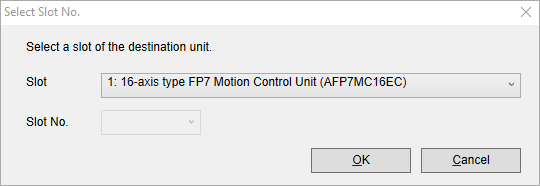
- Selezionate il numero dello slot sul quale è installata fisicamente l'unità EtherCAT FP7 e selezionate OK.
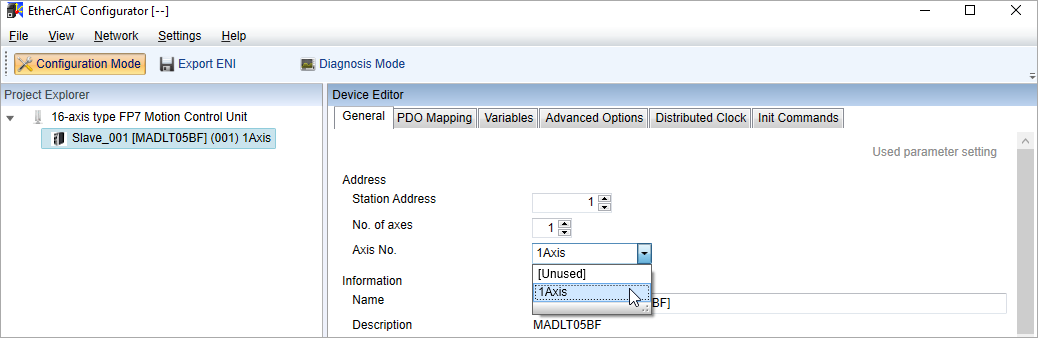
- L'asse collegato è visualizzato nel Project Explorer. Scegliete il numero dell'asse del numero della stazione corrispondente. Poi chiudete la finestra.
- Scaricate la configurazione selezionando il pulsante evidenziato in verde.
- Selezionate il numero dello slot sul quale è installata fisicamente l'unità EtherCAT FP7 e selezionate Yes.
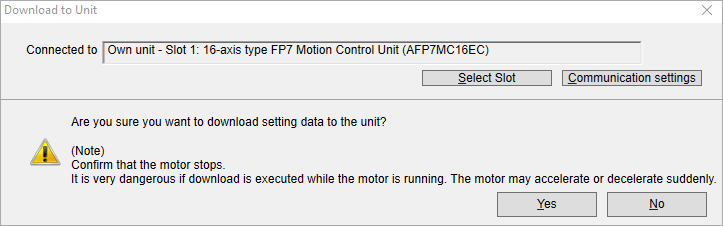
- Selezionate OK per completare il processo