Controllo di velocità
Prima di iniziare
Prima di mettere in esercizio questo prodotto leggete le istruzioni di sicurezza contenute nel rispettivo Operating Instructions della serie MINAS.
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Informazioni su questo documento
Istruzioni passo dopo passo vi spiegano il collegamento di un PLC ad un servoazionamento MINAS e l'impostazione dei parametri più importanti nel software di configurazione PANATERM.
Software disponibile
Il seguente software è disponibile gratuitamente.
-
Questo collegamento porta al sito Web di Panasonic Industry Co., Ltd.
Visione d'insieme delle funzioni
Il controllo di velocità è una modalità di controllo per cambiare la velocità di rotazione del motore, per esempio per assicurare determinate velocità per un nastro trasportatore o una macchina mossa da vite a ricircolo di sfere. La velocità è generalmente controllata da segnali analogici (p.es da 0 a 10V) all'ingresso analogico del servoazionamento.
Esempio
L'unità di uscita analogica FP0RA21 e il servoazionamento MINAS A6SF si collegano con il cavo DVOP4360V. Un segnale analogico da 0 a 10V è inviato dall'unità al servoazionamento. Ulteriori segnali come servo-ready o lo stato di allarme del servoazionamento possono essere trasmessi al PLC attraverso lo stesso cavo.

Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Connettori del servoazionamento
Connettore XA (connettore di alimentazione)
Collegate il cavo di alimentazione al connettore XA. Per un'alimentazione monofase di 230V collegare al servoazionamento un cavo a due conduttori come illustrato. Nella modalità monofase non occorre il pin L2.

Connettore XB (connettore motore)
Collegate il cavo del motore al connettore XB. I conduttori sono indicati dalle lettere U, V e W. Non cambiate l'ordine delle fasi del motore collegando per esempio V a W.

Connettore X6 (connettore encoder)
Collegate il cavo encoder al connettore X6.

Connettore X4 (connettore I/O)
Collegate il cavo di collegamento al connettore X4 e all'unità di uscita analogica.

Connettore X1 (connettore USB per collegamento al PC)
Il servoazionamento è configurato con il software di configurazione PANATERM. Per collegare il PC al servoazionamento usate un cavo USB A a mini USB B commerciale.

Ingressi e uscite segnale del connettore X4
Per il controllo di velocità, il connettore X4 del servoazionamento MINAS A5/A6 è dotato di un ingresso analogico con una risoluzione di 16 bit. Il range di tensione è da 0V a +/-10V. L'ingresso analogico è evidenziato nel diagramma di cablaggio.
Nel nostro esempio usiamo gli ingressi e le uscite segnale seguenti:
SRV-ON (pin 29)
Ingresso servo ON per alimentare il servomotore.
COM+ (pin 7)
Comune per l'alimentazione dei segnali di comando.
SPR/TRQR/SPL (pin 14–15)
Ingresso comando velocità analogico.
S-RDY (pin 34–35)
Uscita servo-ready per indicare lo stato Pronto del servoazionamento.
ALM (pin 36–37)
Uscita allarme servo
Per ulteriori particolari su ingressi e uscite segnale utili per la vostra applicazione, vi preghiamo di consultare il Manuale di istruzioni del vostro servoazionamento MINAS A5/A6.

Cablaggio PNP del connettore X4

Cablaggio NPN del connettore X4

Impostare parametri in PANATERM
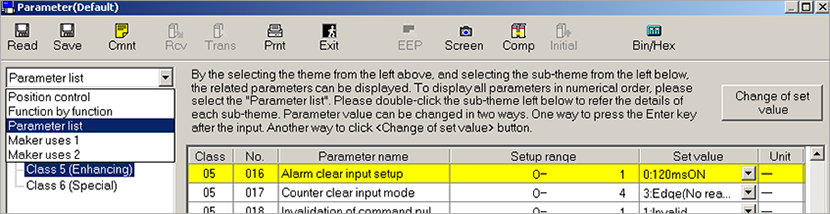
Usate il software di configurazione PANATERM per configurare il servoazionamento MINAS.
- Selezionate la scheda Parameter.
- Selezionate la lista di parametri per il vostro tipo di servoazionamento.
Visione d'insieme dei parametri basilari
La seguente tabella riporta il campo di valori e la descrizione dei parametri basilari.
Parametro |
Campo |
Descrizione |
|---|---|---|
Pr0.01 |
da 0 a 6 |
Modalità di controllo |
Pr3.00 |
da 0 a 3 |
Modalità di controllo della velocità |
Pr3.02 |
da 10 a 2000 [g/min/V] |
Guadagno del comando della velocità in ingresso |
Pr3.03 |
da 0 a 1 |
Inversione del comando della velocità in ingresso |
Pr3.12 |
da 0 a 10000 [ms/(1000g/min)] |
Tempo di accelerazione |
Pr3.13 |
da 0 a 10000 [ms/(1000g/min)] |
Tempo di decelerazione |
Pr4.22 |
da -27888 a 27888 LSB (MINAS A5) da -5578 a 5578 LSB (MINAS A6F) |
Offset dell'ingresso analogico 1 |
Pr4.23 |
da 0,00 a 64,00 [ms] (MINAS A5, MINAS A6F) |
Filtro dell'ingresso analogico 1 |
Pr4.24 |
da 0,00 a 10,0 [V] |
Limite di tensione per l'ingresso analogico 1 |
Pr0.01 (Modalità di controllo
Parametro PANATERM: Control mode setting
Campo di valori: da 0 a 6
Il valore di default è 0: Controllo di posizione
Selezionate 1: Controllo di velocità
Pr3.00 (Modalità di controllo della velocità
Parametro PANATERM: Inside/outside speed setting switching
Campo di valori: da 0 a 3
Il valore di default è 0: Ingresso comando velocità analogico (SPR)
Selezionate 0: Ingresso comando velocità analogico (SPR). (Le altre impostazioni valgono per il controllo velocità attraverso comandi velocità interni.)
Pr3.02 (Guadagno del comando della velocità in ingresso)
Parametro PANATERM: Speed command input gain
Campo di valori: da 10 a 2000 [g/min/V]
Il valore di default è 500 [g/min/V].
Selezionate un fattore di guadagno per la velocità di rotazione del motore basato sulla tensione applicata all'ingresso comando velocità SPR. Per esempio un valore di 500g/min per 1V ha per risultato, con una tensione d'ingresso di 6V, una velocità di 3000g/min.
Pr3.03 (Inversione del comando della velocità in ingresso)
Parametro PANATERM: Speed command input inversion
Campo di valori: da 0 a 1
- 0: nessuna inversione, senso di rotazione positivo per tensione positiva
- 1: inversione, senso di rotazione positivo per tensione negativa
Il valore di default è 1.
Scegliete la polarità della tensione applicata all'ingresso analogico del servoazionamento.
Pr3.12 (Tempo di accelerazione)
Parametro PANATERM: Acceleration time setting
Campo di valori: da 0 a 10000 [ms/(1000r/min)]
Il valore di default è 0 [ms/(1000g/min)].
Scegliete il tempo occorrente dalla velocità iniziale alla velocità target (tempo di accelerazione). Il valore 10 ha per risultato per esempio un tempo di accelerazione di 10ms per una velocità target di 1000g/min.
Pr3.13 (Tempo di decelerazione)
Parametro PANATERM: Deceleration time setting
Campo di valori: da 0 a 10000 [ms/(1000r/min)]
Il valore di default è 0 [ms/(1000g/min)].
Scegliete il tempo occorrente dalla velocità target alla velocità iniziale (tempo di decelerazione). Il valore 10 ha per risultato per esempio un tempo di decelerazione di 10ms.
Pr4.22 (Offset dell'ingresso analogico 1)
Parametro PANATERM: Analog input 1 (A|1) offset setting
- da -27888 a 27888 LSB (MINAS A5)
- da -5578 a 5578 LSB (MINAS A6F)
Il valore di default è 0.
Scegliete un valore di offset per compensare la deriva con un'ulteriore coppia sull'albero motore.
Pr4.23 (Filtro dell'ingresso analogico 1)
Parametro PANATERM: Analog input 1 (A|1) filter setting
Campo di valori: da 0,00 a 64,00 [ms]
Il valore di default è 0.
Questo parametro funge da filtro passa-basso per produrre una tensione stabile: quanto più alto il valore tanto più lungo il ritardo.
Pr4.24 (Limite di tensione per l'ingresso analogico 1)
Parametro PANATERM: Analog input 1 (A|1) excessive setting
Campo di valori: da 0,00 a 10,0 [V]
Il valore di default è 0,0V.
Scegliete la sovracorrente massima ammissibile dell'ingresso analogico 1.
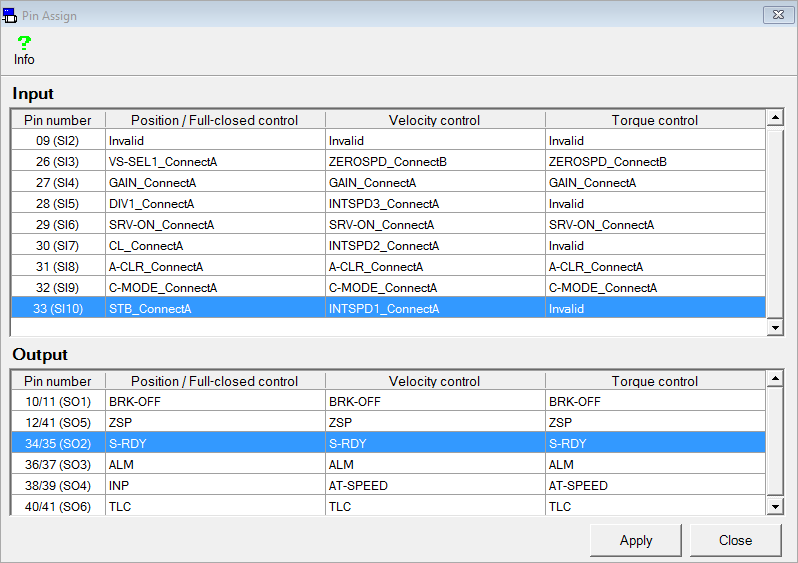
Modificare l'assegnazione dei pin in PANATERM
Per alcune applicazioni si deve cambiare la funzione software dei pin fisici del servoazionamento. Usate il software di configurazione PANATERM per modificare l'assegnazione dei pin.
- Selezionate .
L'assegnazione dei pin attuale viene caricata dal servoazionamento.
- Selezionate un qualsiasi ingresso non richiesto dalla vostra applicazione e fate doppio clic.