PANATERM– Trial run
Prima di iniziare
Prima di mettere in esercizio questo prodotto leggete le istruzioni di sicurezza contenute nel rispettivo Operating Instructions della serie MINAS.
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Informazioni su questo documento
Istruzioni passo dopo passo vi spiegano la configurazione di un trial run per un servoazionamento MINAS nel software di configurazione PANATERM.
Software disponibile
Il seguente software è disponibile gratuitamente.
-
Questo collegamento porta al sito Web di Panasonic Industry Co., Ltd.
Visione d'insieme delle funzioni
Con il software di configurazione PANATERM si può muovere il servomotore manualmente senza collegare un'unità di controllo esterna (PLC, CNC, encoder, ecc.). Con questa funzione potete eseguire dei trial run della vostra applicazione e la regolazione meccanica della vostra macchina.
|
|
|---|---|
|
Eseguite trial run del servo motore solo con l'albero del motore disinnestato dalla macchina per evitare incidenti. |


Procedura generale per trial run
In questo esempio configuriamo un movimento ripetuto continuo.
La procedura generale comprende i seguenti passi:
Aprite la scheda TrialRun in PANATERM.
Abilitate la funzione servo del motore.
Fate le impostazioni del movimento.
Fate le impostazioni di sicurezza.
Avviate l'operazione di verifica.
Configurare il trial run
Aprite la scheda TrialRun in PANATERM
La scheda TrialRun è disponibile solo se un servoazionamento è collegato al vostro PC.
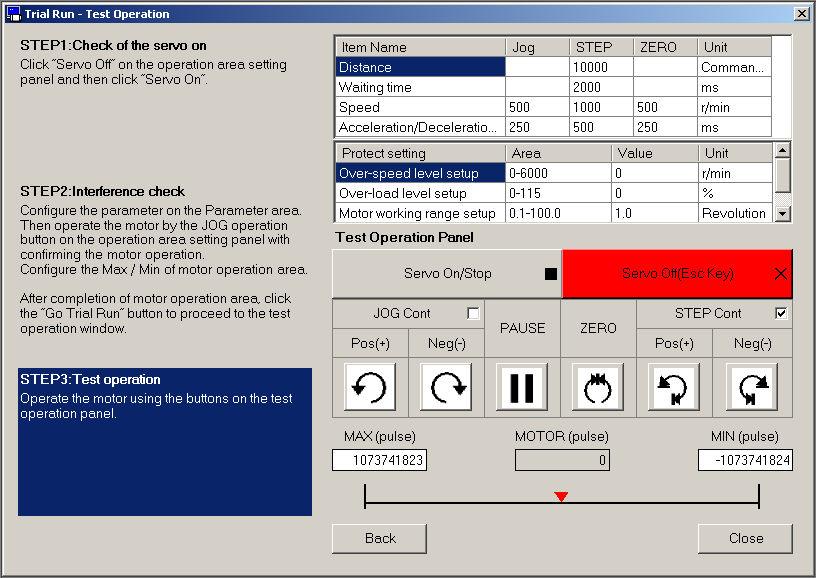
- Selezionate la scheda TrialRun.
Si apre il dialogo Operation Area Setting.

- (1) Scheda TrialRun
Abilitate la funzione servo del motore
Per impostare i parametri del servoazionamento ed eseguire il controllo di posizione, in PANATERM deve essere abilitata la funzione servo del motore. Usate i pulsanti servo rosso e verde sulla scheda TrialRun per simulare il segnale SRV_ON.
- Selezionate il pulsante rosso Servo Off(Esc Key) per abilitare la funzione servo ON/OFF.Funzione servo ON/OFF disabilitata

- Selezionate il pulsante grigio Servo On/Stop per abilitare la funzione servo.La funzione servo ON/OFF è abilitata

Quando la funzione servo è ON sentite i clic di un relè interno. Ora i parametri del servoazionamento possono essere adeguati e l'asse è pronto ad eseguire il controllo di posizione.
MINAS LIQI: Quando il pulsante Servo On/Stop è stato selezionato, i LED sul servoazionamento passano da “- -.“ a “P. c.” per indicare che i parametri del servoazionamento possono essere adeguati tramite PC.
Cambiamento dell'indicazione dei LED su MINAS LIQI
Se adesso si verifica un errore, aprite la scheda Alarm ed eliminate la causa dell'errore. Eliminate l'allarme e riprendete dal passo 1.
Eseguire impostazioni del movimento
Eseguite le impostazioni del movimento nella lista dei parametri della scheda TrialRun.
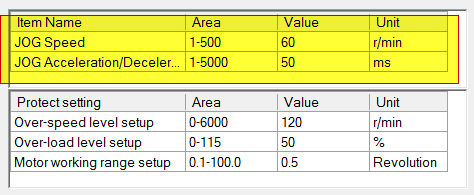
JOG speed: Velocità rotazione del motore in [g/min] per il movimento avviato dal pulsante JOG
Pulsanti JOG per il senso di rotazione positivo e negativo
JOG acceleration/deceleration: Tempo di accelerazione e decelerazione in [ms]
Impostazioni di sicurezza
Le impostazioni di sicurezza nella parte inferiore della scheda TrialRun sono collegate direttamente con i parametri del servoazionamento Pr5.12, Pr5.13 e Pr5.14. Se cambiate un valore in questa scheda, questo sarà impostato automaticamente nel servoazionamento.
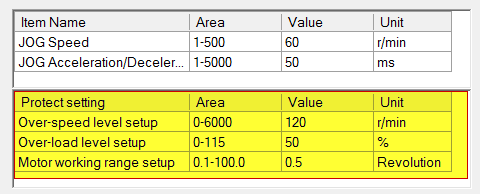
Over-load level setup: Limite massimo della coppia in percentuale.
Auto-set (Over-speed level setup): Limite di velocità massimo in [g/min]. Selezionate Auto-set (Over-speed level setup) per impostare un valore del doppio della velocità JOG.
Motor working range setup: Campo di lavoro del motore per giro. Il valore è calcolato in base ai due valori precedenti.
MAX (pulse), MIN (pulse): Usate i pulsanti JOG per impostare valori limite per il movimento in direzione positiva e negativa.
Valori massimi per il movimento in direzione positiva e negativa
- (1) Valore attuale
Se si verifica un errore aprite la scheda Alarm. Potete trovare istruzioni su come risolvere il problema sul lato destro della scheda sotto a Treatment. Nella maggior parte dei casi il problema si dovrebbe risolvere alzando il valore massimo sulla scheda TrialRun o nella lista dei parametri.

Avviare l'operazione di verifica
Dopo aver attivato la funzione servo e aver impostato tutti i parametri, potete avviare il trial run.
- Selezionate uno dei pulsanti JOG per il movimento in direzione positiva o negativa.Finestra di dialogo Test Operation della scheda TrialRun