PANATERM - Funzionalità di real time autotuning
Prima di iniziare
Prima di mettere in esercizio questo prodotto leggete le istruzioni di sicurezza contenute nel rispettivo Operating Instructions della serie MINAS.
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Informazioni su questo documento
Istruzioni passo dopo passo vi spiegano come usare la funzionalità di real time autotuning per un servoazionamento MINAS. L'autotuning si esegue con il software di configurazione PANATERM.
Software disponibile
Il seguente software è disponibile gratuitamente.
-
Questo collegamento porta al sito Web di Panasonic Industry Co., Ltd.
Visione d'insieme delle funzioni
L'autotuning è necessario per tutte le applicazioni per adeguare il servomotore alle condizioni meccaniche specifiche. Potete scegliere una delle seguenti funzioni di autotuning:
Tuning fit gain
Funzionalità di real time autotuning
Questa Guida rapida spiega come eseguire la funzionalità di real time autotuning.
Mentre la funzionalità di tuning fit gain vi guida attraverso un processo automatico di tuning di precisione, la funzionalità di real time autotuning ottimizza soprattutto la rigidità della macchina. Se state utilizzando un servoazionamento MINAS A6, provate prima il tuning fit gain. Se il tuning fit gain non ha dato i risultati desiderati, eseguite un real time autotuning. Entrambi i metodi possono essere applicati utilizzando PANATERM.
Se possibile dovreste eseguire la funzionalità di real time autotuning sulla macchina con il servomotore ed i carichi meccanici collegati e con i movimenti reali.
L'autotuning ha normalmente i seguenti obiettivi:
Ridurre il tempo di adattamento per ridurre i tempi di ciclo
Ridurre vibrazioni meccaniche per aumentare la durata della macchina
Ridurre sovraoscillazioni e sottooscillazioni per raggiungere la posizione target entro l'isteresi ammissibile
Diminuire i tempi di risposta per raggiungere più rapidamente la posizione target
Sovraoscillazione, sottooscillazione e tempo di adattamento del valore della posizione
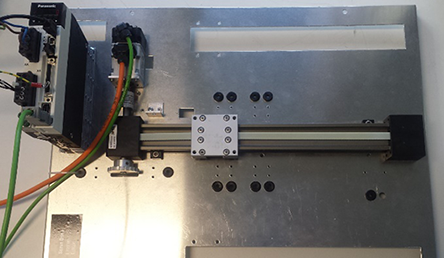
Esempio
Un servoazionamento MINAS A6SF è collegato ad un servomotore che aziona un nastro trasportatore. La modalità di controllo è il controllo di posizione. Questo richiede un movimento continuo entro i limiti meccanici, senza vibrazioni meccaniche, senza sovraoscillazioni o sottooscillazioni, e un tempo di adattamento possibilmente breve.
Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Connettori del servoazionamento
Connettore XA (connettore di alimentazione)
Collegate il cavo di alimentazione al connettore XA. Per un'alimentazione monofase di 230V collegare al servoazionamento un cavo a due conduttori come illustrato. Nella modalità monofase non occorre il pin L2.

Connettore XB (connettore motore)
Collegate il cavo del motore al connettore XB. I conduttori sono indicati dalle lettere U, V e W. Non cambiate l'ordine delle fasi del motore collegando per esempio V a W.

Connettore X6 (connettore encoder)
Collegate il cavo encoder al connettore X6.

Connettore X1 (connettore USB per collegamento al PC)
Il servoazionamento è configurato con il software di configurazione PANATERM. Per collegare il PC al servoazionamento usate un cavo USB A a mini USB B commerciale.

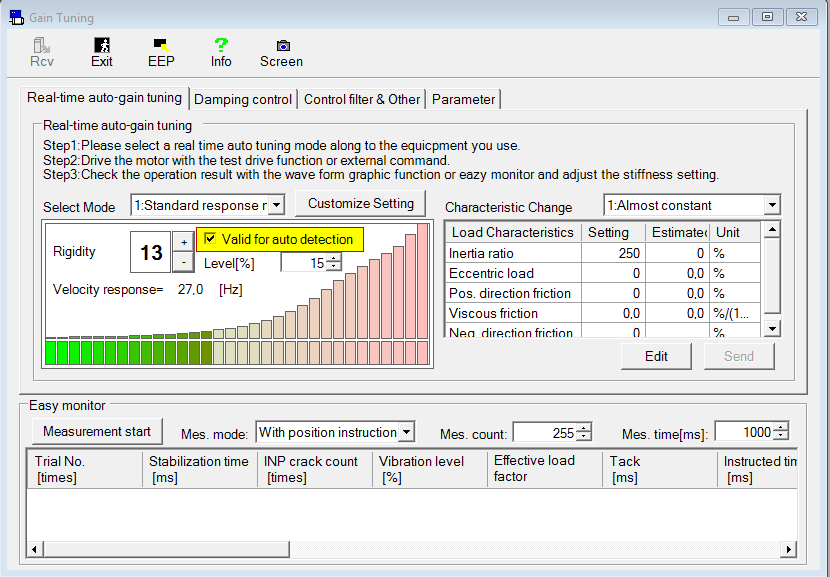
Eseguire la funzionalità di real time autotuning
Usate il software di configurazione PANATERM per eseguire l'autotuning.
- Mentre il motore esegue un movimento ripetuto continuo, selezionare la scheda Tuning.

- (1) Scheda Tuning
- Selezionate la scheda Damping control.

- (1) Scheda Damping control
- Selezionate la casella di controllo Valid for auto detection.