Position control with SIMATIC S7-1200 host controller over Modbus RTU
Prima di iniziare
Prima di utilizzare questo prodotto, leggere le istruzioni di sicurezza contenute nel manuale Operating Instructions. Il presente prodotto è concepito esclusivamente per uso industriale. Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Documenti correlati
Technical Reference - Modbus communication and block operation specification (SX-DSV03042) per MINAS A6. Questo manuale può essere scaricato dal sito Web di Panasonic Industry Co., Ltd.
 .
.SIMATIC S7-1200 Programmable controller System Manual.
Configurazione

In questo esempio, un PLC SIMATIC S7-2100 è collegato a un servoazionamento MINAS A6SF tramite Modbus RTU.
Per la comunicazione è necessaria una scheda di comunicazione per il PLC, poiché la CPU non include la comunicazione Modbus RTU come standard.
Utilizzare un cavo di comunicazione dedicato per il collegamento RS485 alla scheda di comunicazione.
In questo esempio vengono utilizzati i seguenti hardware e software:
Dispositivi:
Servoazionamento e motore serie MINAS A6SF
SIMATIC S7-1200 PLC (6ES7-212-1BE40-0XB0), versione firmware 4.7.0
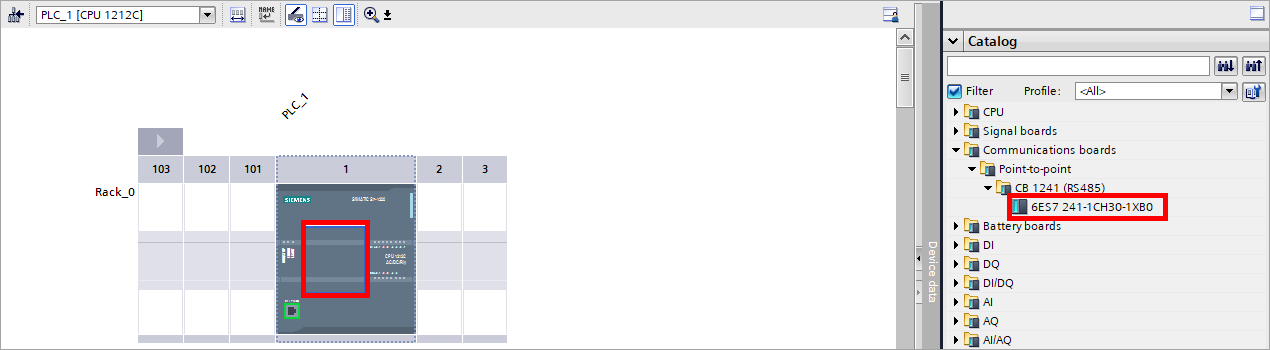
SIMATIC S7-1200 scheda di comunicazione CB 1241, RS-485 (6ES7-241-1CH30-1XB0)
Cavo:
Cavo di comunicazione RS485/RS232 per MINAS A6 (X2), 8 pin, 2m QUAE0002071 (DV0PM20024CAB)
Software:
STEP 7 (TIA Portal) V17
PANATERM (disponibile gratuitamente)
Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Collegare il servoazionamento
Connettore XA (connettore di alimentazione)
Collegate il cavo di alimentazione al connettore XA. Per un'alimentazione monofase di 230V collegare al servoazionamento un cavo a due conduttori come illustrato. Nella modalità monofase non occorre il pin L2.

Connettore XB (connettore motore)
Collegate il cavo del motore al connettore XB. I conduttori sono indicati dalle lettere U, V e W. Non cambiate l'ordine delle fasi del motore collegando per esempio V a W.

Connettore X6 (connettore encoder)
Collegate il cavo encoder al connettore X6.

Connettore X2 (porta seriale)
Collegate il cavo per comunicazione seriale QUAE0002071 (DV0PM20024CAB020) al connettore X2 e alla scheda di comunicazione del PLC S7-1200.


Eseguire i seguenti connessioni:
TA deve essere collegato a T/RA e TB a T/RB.
Il ponticello TA-T/RA deve essere collegato al terminale negativo del servoazionamento.
Il ponticello TB-T/RB deve essere collegato al terminale positivo del servoazionamento.
Il collegamento GND con M non è necessario.
Connettore X1 (connettore USB per collegamento al PC)
Il servoazionamento è configurato con il software di configurazione PANATERM. Per collegare il PC al servoazionamento usate un cavo USB A a mini USB B commerciale.

Impostare parametri in PANATERM
Usate il software di configurazione PANATERM per configurare il servoazionamento MINAS.
- Selezionate la scheda Parameter.
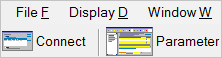
- Selezionate la lista di parametri per il vostro tipo di servoazionamento.
Visione d'insieme dei parametri basilari
La seguente tabella riporta il campo di valori e la descrizione dei parametri basilari.
Parametro |
Campo |
Descrizione |
|---|---|---|
Pr0.00 |
0 o 1 |
Direzione di rotazione del motore |
Pr0.01 |
da 0 a 6 |
Modalità di controllo |
Pr0.08 |
da 0 a 1048576 [impulsi] (MINAS A5) da 0 a 8388608 [impulsi] (MINAS A6) |
Numero di impulsi per giro del motore |
Pr4.05 |
da 0 a 16777215 |
Funzione assegnata al pin 29 del connettore X4 |
Pr5.29 |
da 0 a 7 |
Baud rate RS232C |
Pr5.30 |
da 0 a 7 |
Baud rate RS485 |
Pr5.31 |
da 0 a 127 |
Numero dell'asse |
Pr5.37 |
da 0 a 2 |
Protocollo di comunicazione |
Pr5.38 |
da 0 a 5 |
Bit di parità e di stop per Modbus |
Pr5.39 |
da 0 a 10000 |
Tempo di attesa per risposta Modbus |
Pr6.28 |
da 0 a 2 |
Modalità block operation |
Pr0.00 (Direzione di rotazione del motore)
Parametro PANATERM: Rotational direction setting
Campo di valori: 0 o 1
Il valore di default è 1: CCW (rotazione in senso antiorario)
Pr0.01 (Modalità di controllo
Parametro PANATERM: Control mode setting
Campo di valori: da 0 a 6
Il valore di default è 0: Controllo di posizione
Selezionate 0: Controllo di posizione (la modalità block operation supporta solo il controllo di posizione)
Pr0.08 (Numero di impulsi per giro del motore
Parametro PANATERM: Command pulse number per one motor revolution
Campo di valori: da 0 a 8388608 [impulsi]
Il valore di default è di 10000 impulsi per rotazione del motore.
Pr4.05 (Funzione assegnata al pin 29 del connettore X4
Parametro PANATERM: SI6 input selection
Campo di valori: da 0 a 16777215
Il valore di default è 197379: ingresso servo ON
Scegliete 0 per disabilitare l'assegnazione dei pin di default.
Pr5.30 (Baud rate RS485
Usate questo parametro se il servoazionamento è collegato attraverso RS485.
Parametro PANATERM: RS485 communication baud rate setting
Campo di valori: da 0 a 7 (da 2400 a 230400bit/s)
Il valore di default è 2 (9600bit/s).
Verificate che l'impostazione della baud rate sia identica nel programma del PLC e nel servoazionamento.
Pr5.31 (Numero dell'asse)
Parametro PANATERM: Numero dell'asse
Campo di valori: da 0 a 127
Il valore di default è 1.
Scegliete un valore fra 1 e 127. 0 non è permesso per Modbus RTU. Verificate che l'impostazione del numero dell'asse sia identica nel programma del PLC e nel servoazionamento.
Pr5.37 (Protocollo di comunicazione)
Parametro PANATERM: Modbus connection setting
Campo di valori: da 0 a 2
Il valore di default è 0 (protocollo standard MINAS).
Selezionate 2: Modbus-RTU (comunicazione RS485).
Pr5.38 (Bit di parità e di stop per Modbus)
Parametro PANATERM: Modbus communication setting
Campo di valori: da 0 a 5
Il valore di default è 0: Pari/1 bit
Verificate che l'impostazione di bit di parità e bit di stop sia identica nel programma del PLC e nel servoazionamento.
Pr5.39 (Tempo di attesa per risposta Modbus)
Parametro PANATERM: Modbus response waiting time
Campo di valori: da 0 a 10000
Il valore di default è 0.
Pr6.28 (Modalità block operation)
Parametro PANATERM: Special function selection
Campo di valori: da 0 a 1
Il valore di default è 0.
Selezionate 1: block operation valida (Modbus)
Impostare l'host controller
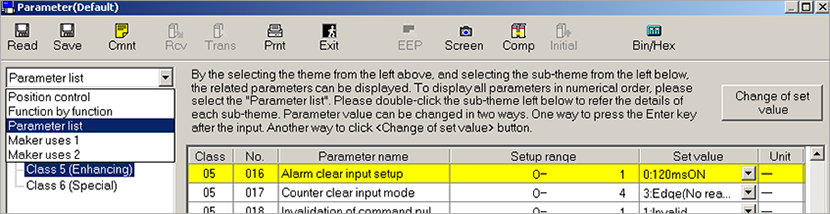
Creare un nuovo progetto in TIA Portal
Quando si crea un nuovo progetto in TIA Portal, selezionare il PLC da utilizzare, aggiungere la scheda di comunicazione e impostare l'indirizzo IP.
- Selezionare il tipo di PLC.
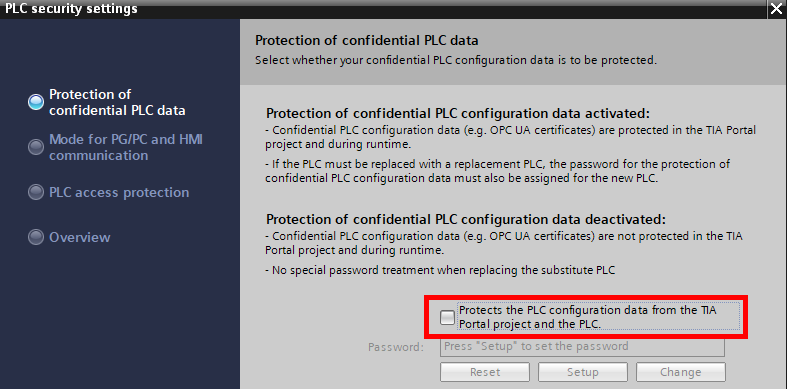
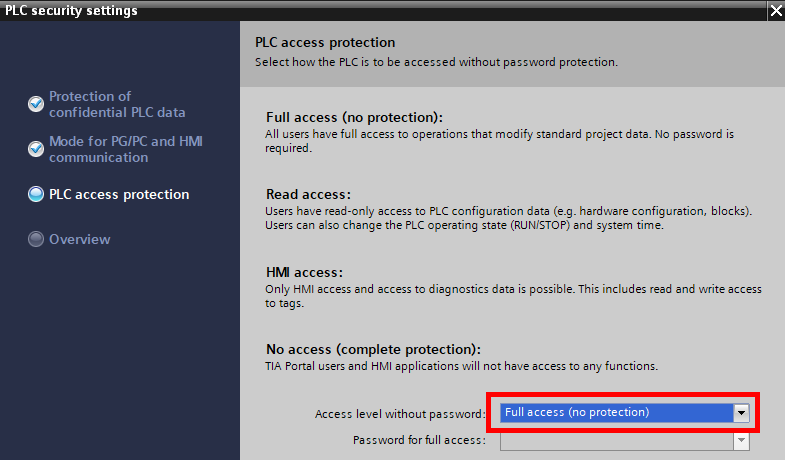
- Specificare le impostazioni di sicurezza. In questo esempio, non è stata impostata alcuna password.
- Aggiungere la scheda di comunicazione necessaria per la comunicazione Modbus RTU.
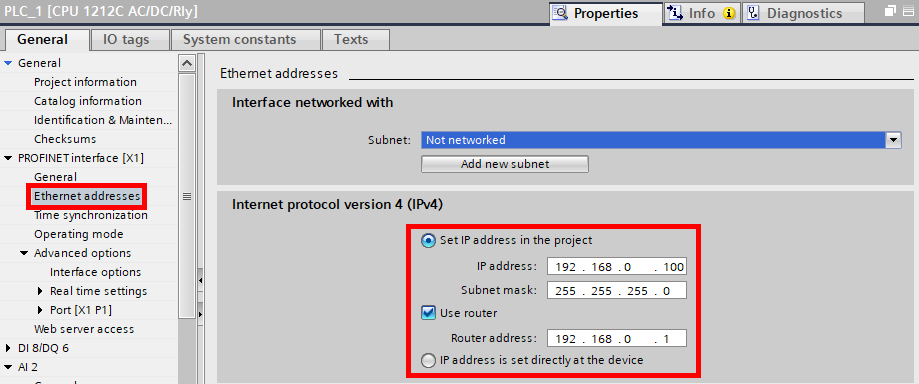
- Impostare l'indirizzo IP del PLC. Il PLC deve trovarsi nella stessa rete del PC.
Creare un programma PLC
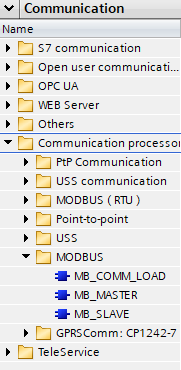
Nella task card Comunicazione, visualizzare le istruzioni MODBUS nel blocco processore Comunicazione. AggiungereMB_COMM_LOAD e MB_MASTER al blocco di programma principale.
MB_COMM_LOAD
Utilizzare l'istruzione MB_COMM_LOAD per configurare la porta sulla scheda di comunicazione Modbus RTU.
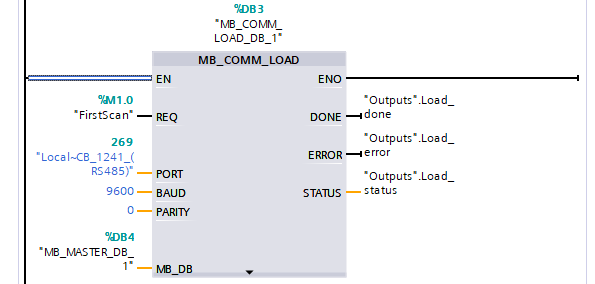
Ingresso
- EN
Abilita l'istruzione.
- REQ
Un fronte di salita avvia l'operazione. Si raccomanda di consentire il rilevamento dei bordi nel primo ciclo (tag FirstScan).
- PORT
Imposta la porta di comunicazione:
- BAUD
Impostare la velocità di comunicazione. Deve corrispondere all'impostazione del Pr.5.30 nel software di configurazione PANATERM.
Valori:- 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 76800, 115200
- PARITY
Imposta la parità di comunicazione. Deve corrispondere all'impostazione del Pr.5.38 nel software di configurazione PANATERM.
Valori:- 0: Nessuna
- 1: Dispari
- 2: Pari
- MB_DB
Imposta il nome dell'istruzione MB_MASTER.
Uscita
- ENO
TRUE se la funzione viene eseguita senza errori.
- DONE
TRUE per una scansione dopo che l'ultima richiesta è stata completata senza errori.
- ERROR
TRUE per una scansione dopo che l'ultima richiesta è stata completata con un errore.
- STATUS
Restituisce il codice di errore.
MB_MASTER
Utilizzare l'istruzione MB_MASTER per trasmettere dati allo slave Modbus RTU.
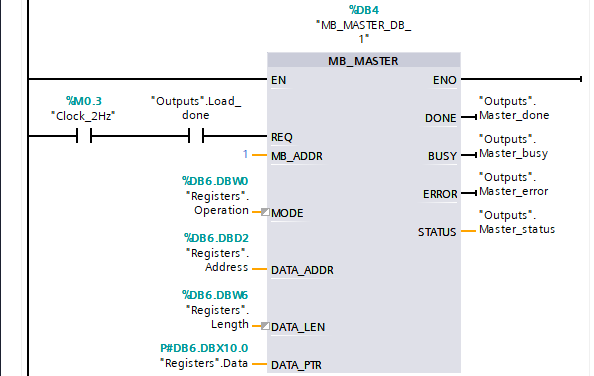
Ingresso
- EN
Abilita l'istruzione.
- REQ
Impostare le condizioni per la trasmissione dei dati allo slave Modbus RTU. In questo esempio, l'istruzione di configurazione MB_COMM_LD viene eseguita ogni 0,5 secondi.
- MB_ADDR
Impostare l'ID dello slave. Deve corrispondere all'impostazione del Pr.5.31 nel software di configurazione PANATERM.
- MODE
Impostare il tipo di operazione.
Valori:- 0: Lettura
- 1: Scrittura
- DATA_ADDR
Impostare l'indirizzo iniziale dei dati a cui accedere nello slave. Per gli indirizzi validi, vedere la tabella delle funzioni Modbus.
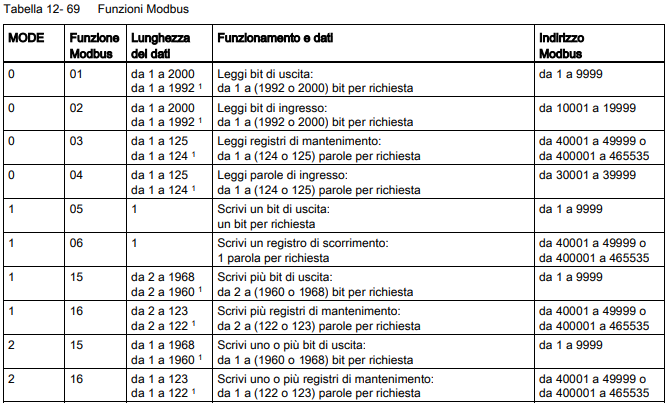
Origine: Sistema di automazione S7-1200, System Manual, Manuale di sistema, 03/2014, A5E02486684-AG
NOTAÈ necessario aggiungere 1 all'indirizzo Modbus indicato nel manuale Technical Reference - Modbus communication and block operation specification (SX-DSV03042).- DATA_LEN
Impostare il numero di bit o word a cui accedere. Per le lunghezze valide, vedere la tabella delle funzioni Modbus.
- DATA_PTR
Punta alla variabile che riceve i dati da leggere o imposta i dati da scrivere. Utilizzare un array per leggere o scrivere più registri.
Uscita
- ENO
TRUE se la funzione viene eseguita senza errori.
- DONE
TRUE per una scansione dopo che l'ultima richiesta è stata completata senza errori.
- BUSY
- Valori:
- 0: Nessuna operazione in corso
- 1: Operazione in corso
- ERROR
TRUE per una scansione dopo che l'ultima richiesta è stata completata con un errore.
- STATUS
Restituisce il codice di errore.
Esempio di programmazione
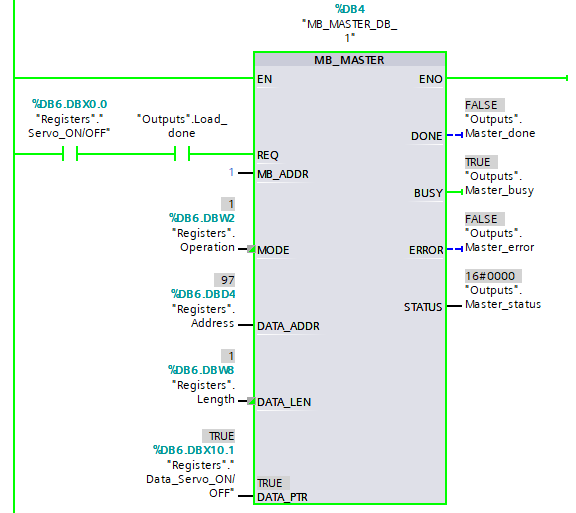
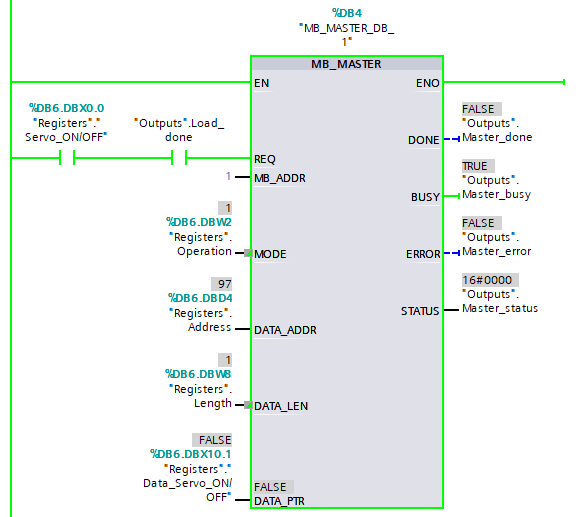
Impostare Servo ON - Servo OFF
Per inviare un segnale di richiesta di attivazione al servoazionamento, impostare l'indirizzo Modbus dell'operazione SERV-ON su DATA_ADDR e impostare DATA_PTR su TRUE.
Per inviare una richiesta di disattivazione del servo, impostare DATA_PTR su FALSE.
È necessario aggiungere 1 all'indirizzo Modbus indicato nel manuale Technical Reference - Modbus communication and block operation specification (SX-DSV03042).
In questo esempio, impostare 97 (0060h = 96) per DATA_ADDR.

Origine: Technical Reference - Modbus communication and block operation specification (SX-DSV03042)
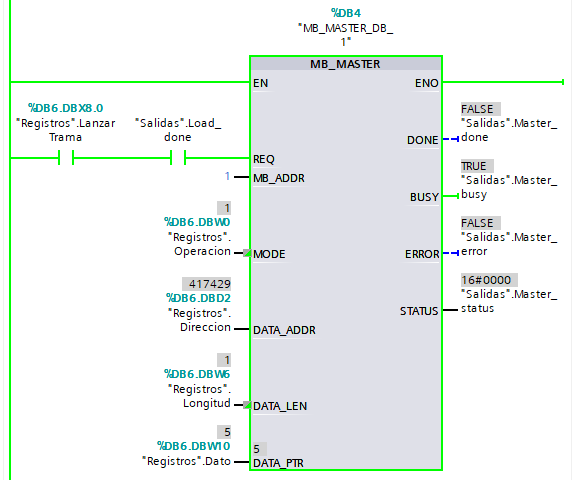
Impostare un numero di block command
Per eseguire un block command, impostare l'indirizzo Modbus per i numeri di blocco su DATA_ADDR e il numero del block command su DATA_PTR. In questo esempio, si imposterà il block command numero 5.
È necessario aggiungere 1 all'indirizzo Modbus indicato nel manuale Technical Reference - Modbus communication and block operation specification (SX-DSV03042). L'indirizzo Modbus è preceduto dal codice funzione 4.
In questo esempio, impostare 417429 (4202h = 17428, codice funzione = 4) per DATA_ADDR.

Origine: Technical Reference - Modbus communication and block operation specification (SX-DSV03042)
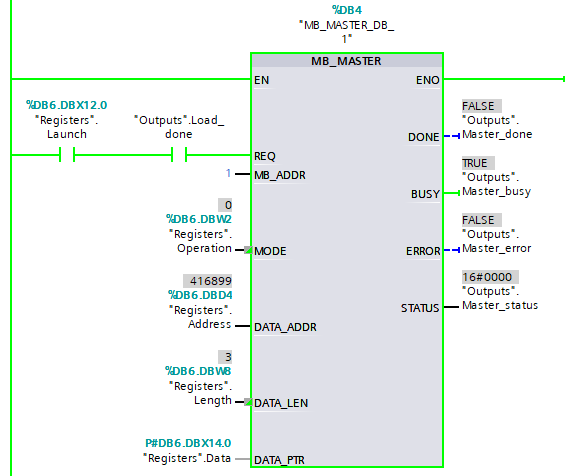
Leggere la posizione dell'encoder
Per leggere la posizione dell'encoder, impostare l'indirizzo Modbus per le operazioni monogiro o multigiro su DATA_ADDR. DATA_PTR punta ai byte di dati del valore di posizione.
È necessario aggiungere 1 all'indirizzo Modbus indicato nel manuale Technical Reference - Modbus communication and block operation specification (SX-DSV03042). L'indirizzo Modbus è preceduto dal codice funzione 4.
In questo esempio, impostare 416899 (4202h = 16898, codice funzione = 4) per DATA_ADDR.

Origine: Technical Reference - Modbus communication and block operation specification (SX-DSV03042)