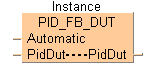
PID_FB_DUT
PID_FB_DUTPID-Regler mit Auto-Tuning
Diese Implementierung erlaubt den Zugriff auf den Befehl F355_PID über die Struktur PID_DUT_31.
Eingang
FALSE: Ermöglicht manuelle Einstellung der Stellgröße
TRUE: Stellgröße wird automatisch vorgegeben
Ausgang
Detaillierte Erläuterungen zu den Parametern finden Sie unter PID_DUT_31.
Der Wert von MV kann von extern entweder gleich beim Programmstart bei der Initialisierung vorgegeben werden oder wenn der Wert von Automatic FALSE ist.
Um maximale Auflösung und minimale Totzeiten jenseits von LowerLimit und UpperLimit zu erzielen, sollten diese Werte möglichst den gesamten Bereich von 0–10000 abdecken.
wenn die Parameterwerte außerhalb ihres erlaubten Bereichs sind.
wenn die Parameterwerte außerhalb ihres erlaubten Bereichs sind.
In der globalen Variablenliste können Sie Variablen festlegen, die von allen POEs des Projekts verwendet werden können.


Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.
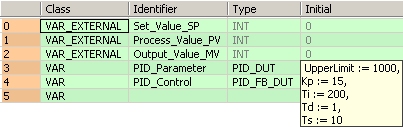
VAR_EXTERNAL
Set_Value_SP: INT:=0;
(*A/D CH0*)
Process_Value_PV: INT:=0;
(*A/D CH1*)
Output_Value_MV: INT:=0;
(*D/A*)
END_VAR
VAR
PID_Parameter: PID_DUT;
(*PID Parameters*)
PID_Control: PID_FB_DUT;
@'': @'';
END_VAR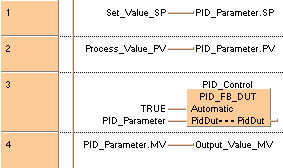
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_VARIN,,Set_Value_SP,9,2,11,4,);
B(B_VAROUT,,PID_Parameter.SP,11,2,13,4,);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 2 ;
NETWORK_BODY
B(B_VARIN,,Process_Value_PV,9,0,11,2,);
B(B_VAROUT,,PID_Parameter.PV,11,0,13,2,);
L(1,0,1,2);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_FB,PID_FB_DUT!,PID_Control,10,1,18,5,,?BAutomatic?BPidDut?APidDut);
B(B_VARIN,,TRUE,8,2,10,4,);
B(B_VARIN,,PID_Parameter,8,3,10,5,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_VARIN,,PID_Parameter.MV,10,2,12,4,);
B(B_VAROUT,,Output_Value_MV,12,2,14,4,);
B(B_COMMENT,,Write manipulated value to the output,3,1,22,2,);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
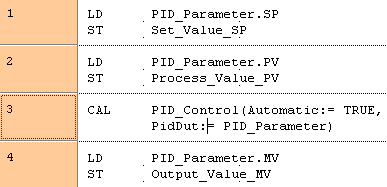
END_BODYPID_Parameter.SP := Set_Value_SP;
PID_Parameter.PV := Process_Value_PV;
PID_Control( Automatic:= TRUE,
PidDut:= PID_Parameter);
Output_Value_MV := PID_Parameter.MV;