


 FP_POS_UNIT_GET_STATUS
FP_POS_UNIT_GET_STATUSAchsenstatus des Positioniermoduls abrufen
Dieser FP-Befehl liest die Statusdaten vom Positioniermodul am durch s1_Slot festgelegten Steckplatz und für die durch s2_Axis festgelegte Achse, wenn der Trigger EN auf TRUE gesetzt ist. Das Ergebnis wird in d1_Status gespeichert.
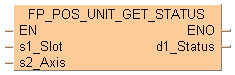
Eingang
Steckplatznummer
Achsennummer
Werte: 1–4, 8 (virtuelle Achse)
Ausgang
Statusinformation
Typen von Achsenstatusinformationen
Bit |
Statusinformation |
TRUE |
|---|---|---|
0 |
Testbetrieb der Achsen |
während des Testbetriebs einer Achse, die mit Hilfe von Configurator PM konfiguriert wurde |
1 |
Fehler |
wenn an der angegebenen Achse ein Fehler aufgetreten ist |
2 |
Warnung |
wenn für die angegebenen Achse eine Warnung ausgegeben wurde |
3 |
Busy |
wenn die angegebene Achse in Betrieb ist |
4 |
Vorgang abgeschlossen |
wenn an der angegebenen Achse ein Vorgang abgeschlossen wurde |
5 |
Referenzpunktfahrt abgeschlossen |
wenn an der angegebenen Achse eine Referenzpunktfahrt abgeschlossen wurde |
wenn der mit dem Index-Modifizierer definierte Bereich größer ist als der zulässige Bereich
wenn die Steckplatz- und/oder Achsennummer ungültig ist
wenn der mit dem Index-Modifizierer definierte Bereich größer ist als der zulässige Bereich
wenn die Steckplatz- und/oder Achsennummer ungültig ist

Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.
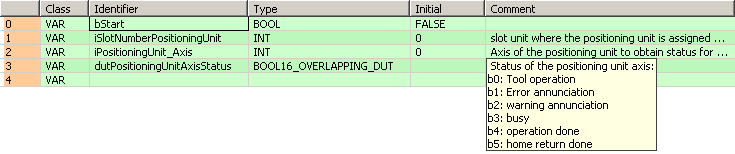
VAR
bStart: BOOL:=FALSE;
iSlotNumberPositioningUnit: INT:=0;
(*slot unit where the positioning unit is assigned 1- 64*)
iPositioningUnit_Axis: INT:=0;
(*Axis of the positioning unit to obtain status for (1-4: axis; 8: virtual axis)*)
dutPositioningUnitAxisStatus: BOOL16_OVERLAPPING_DUT;
(*Status of the positioning unit axis:
b0: Tool operation
b1: Error annunciation
b2: warning annunciation
b3: busy
b4: operation done
b5: home return done*)
END_VARWenn die Variable bStart auf TRUE gesetzt wird, wird die Funktion ausgeführt.

BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_F,FP_POS_UNIT_GET_STATUS!,,17,1,31,6,,?DEN?Ds1_Slot?Ds2_Axis?AENO?Cd1_Status);
B(B_VARIN,,iSlotNumberPositioningUnit,15,3,17,5,);
B(B_VARIN,,iPositioningUnit_Axis,15,4,17,6,);
B(B_VAROUT,,dutPositioningUnitAxisStatus.w0,31,3,33,5,);
B(B_CONTACT,,bStart,3,2,5,4,);
L(5,3,17,3);
L(1,3,3,3);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF bStart then
FP_POS_UNIT_GET_STATUS(s1_Slot := iSlotNumberPositioningUnit,
s2_Axis := iPositioningUnit_Axis,
d1_Status => dutPositioningUnitAxisStatus.w0);
END_IF;