F302_BTAN
F302_BTANOperazione tangente di tipo BCD
La funzione calcola la tangente del dato angolare in codice BCD (ingresso s) e memorizza il risultato (uscita d) sotto forma di valore BCD in un array con tre elementi.
Ingresso
Area in cui viene memorizzato il dato dell'angolo
Uscita
Risultato memorizzato in 3 word
I valori BCD per l'ingresso s si attestano nell'area da 0° a 360° (da 16#0 a 16#360) a passi di 1°. Con ciò, l'uscita d restituisce un risultato nell'intervallo da -57,2900 a 57,2900. Il risultato viene restituito come segue:
segno precedente (0 quando l'ingresso è +, 1 quando l'ingresso è -)
numero intero prima del punto decimale (0 o 1)
numeri dopo il punto decimale con 4 cifre significative come valore BCD (da 16#0000 a 16#9999).
se s non è un valore BCD
se s non è compreso tra 0° e 360°.
se s non è un valore BCD
se s non è compreso tra 0° e 360°.
se il risultato è 0.
se il risultato è in overflow.

Tutte le variabili di ingresso e uscita utilizzate per programmare questa funzione sono state dichiarate nell'intestazione del POU. La stessa intestazione del POU è utilizzata per tutti i linguaggi di programmazione.

VAR
start: BOOL:=FALSE;
(*activates the function*)
input_value: ARRAY [0..2] OF WORD:=[2(0),16#5000];
(*corresponds to 0.5*)
output_value: WORD:=0;
(*result after a 0->1 leading
edge from start: 16#30
corresponds to 30°*)
END_VARIn questo esempio viene dichiarata la variabile di ingresso input_value. Potete tuttavia scrivere una costante (p.es. 16#89 per 89°) direttamente nel contatto di ingresso della funzione.
Quando la variabile start è impostata su TRUE, la funzione viene eseguita. input_value è stato inizializzato con il valore 16#89 (89°) nell'intestazione del POU. Il risultato viene scritto nell'ARRAY output_value. Qui, nel primo elemento dell'ARRAY, output_value = 16# (segno +). Nel secondo elemento, 16#57 rappresenta il numero prima del punto decimale e 16#2899 segue il punto decimale nel terzo elemento.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 14 ;
NETWORK_BODY
B(B_VARIN,,output,6,1,8,3,);
B(B_VARIN,,input_value,6,2,8,4,);
B(B_VAROUT,,output_value,17,2,19,4,);
B(B_F,F302_BTAN,,8,0,17,4,,?DEN?D@'s'?AENO?Cd);
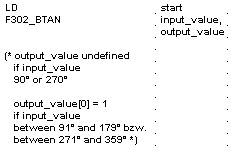
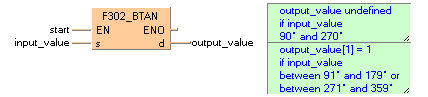
B(B_COMMENT,,output_value undefinedø^if input_valueø^90° or 270°,25,0,37,3,);
B(B_COMMENT,,output_value[0] = 1ø^if input_valueø^between 91° and 179° orø^between 271° and 359°,25,3,37,7,);
L(1,0,1,14);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF start THEN
F302_BTAN(input_value, output_value);
END_IF;