 PULSE_ARC_PASSPULSE_ARC_PASS
PULSE_ARC_PASSPULSE_ARC_PASS其指定控制代码、复合速度、目标位置和通过位置。
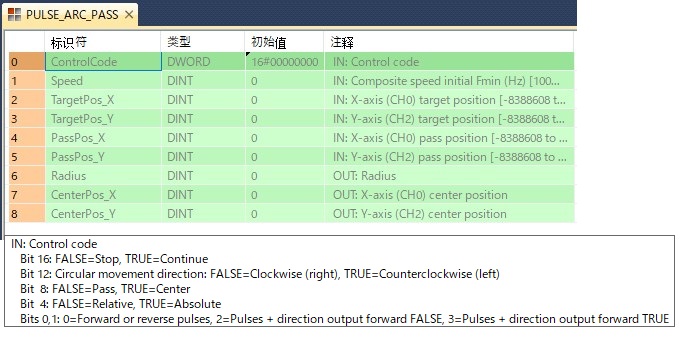
DUT 的各项元素(标识符):
控制代码
偏移量01
位16:FALSE=停止,TRUE=继续
位12:FALSE=CW(右),TRUE=CCW(左)
位8:FALSE=通过,TRUE=中心
位4:FALSE=相对,TRUE=绝对
位0,1:
0=正向或反向脉冲
2=脉冲 + 方向输出正向FALSE
3=脉冲 + 方向输出正向TRUE
复合速度初始Fmin (Hz)
偏移量23
100 Hz–20 kHz
[100–20000]
X轴 (CH0):目标位置
偏移量45
-8388608–+8388607
Y轴 (CH2):目标位置
偏移量67
-8388608–+8388607
X轴 (CH0):通过位置
偏移量89
-8388608–+8388607
Y轴 (CH2):通过位置
偏移量1011
-8388608–+8388607
运算结果存储区域
半径
偏移量1213
输出的脉冲
X轴 (CH0):中心位置
偏移量1415
输出的脉冲
Y轴 (CH2):中心位置
偏移量1617
输出的脉冲