Controllo posizionamento con host controller Beckhoff tramite EtherCAT
Prima di iniziare
Prima di utilizzare questo prodotto, leggere le istruzioni di sicurezza nei seguenti manuali:
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Descrizione
Le istruzioni passo a passo vi guideranno durante la connessione di un host controller Beckhoff C6015 ad un sistema di servoazionamento MINAS A6 Multi. Imparerete inoltre come configurare un programma del PLC e un programma per pannello operatore utilizzando i software TwinCAT 3 Runtime e TwinCAT 3 Engineering di Beckhoff per eseguire un semplice task di posizionamento. La comunicazione avviene tramite EtherCAT.
Software disponibile
Il seguente software è disponibile gratuitamente nell'area Download di Panasonic.
Il seguente software può essere scaricato dal sito web di Beckhoff (https://www.beckhoff.de):
Software TwinCAT 3 Runtime (andare su )
Software TwinCAT3 Engineering (andare su )
Visione d'insieme delle funzioni
Un sistema di servoazionamento Panasonic MINAS A6 Multi comprende un modulo alimentatore, uno o più moduli azionamento da 400V e uno o due motori collegati a ciascun modulo azionamento. La comunicazione può essere realizzata tramite EtherCAT con qualsiasi host controller che supporti il protocollo applicativo CAN su EtherCAT (CoE).
Esempio
Un sistema di servoazionamento composto da un modulo alimentatore da 15kW un modulo azionamento a due assi taglia A da 1,5kW e due servomotori con una potenza nominale di 1,0kW e 1,5kW, viene collegato a un host controller Beckhoff C6015 tramite un cavo Ethernet per permettere la comunicazione via EtherCAT.
Utilizzare i seguenti accessori:
1 cavo di alimentazione da 400V AC: Collega il modulo alimentatore MINAS A6 Multi all'alimentazione principale (400V AC).
1 cavo di alimentazione da 24V DC: Collega l'alimentazione (24V DC) e l'host controller.
1 cavo di messa a terra (terminale a crimpare ad anello M4): Collega i morsetti di terra del modulo alimentatore e il modulo azionamento.
2 cavi del motore Panasonic: Collega il motore e il modulo azionamento.
2 cavi encoder Panasonic: Collega l'encoder e il modulo azionamento.
1 cavo Ethernet (utilizzato per comunicazione EtherCAT): Collega l'host controller e il modulo azionamento.
1 cavo comunicazione RJ11 (2 spine RJ11): Collega il modulo alimentatore e il modulo azionamento.
1 barra alimentatore bus (50mm) con terminale per bus DC link (da535V DC a 675V DC): Collega il modulo alimentatore e il modulo azionamento.
1 barra alimentatore bus (50mm) con terminale per bus di controllo (24V DC): Collega il modulo alimentatore e il modulo azionamento.

- (1) Alimentazione (24V DC)
- (2) Host controller Beckhoff C6015 con software TwinCAT 3 Runtime
- (3) Modulo alimentatore MINAS A6 Multi (400V AC, 15kW)
- (4) Modulo azionamento a due assi MINAS A6 Multi (1,5kW)
- (5) Servomotore B (1,5kW) MINAS A6
- (6) Servomotore A (1kW) MINAS A6
- (7) PC con software TwinCAT 3 Engineering
Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Connettori lato inferiore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X102: Alimentazione principale (400V AC)
Collegare il cavo di alimentazione principale 400V AC a X102. Collegare i morsetti di terra del modulo alimentatore e del modulo azionamento tramite un cavo di messa a terra.
- (2)
X11: Alimentazione di controllo (24V DC)
Collegare l'alimentazione di controllo 24V DC a X11.
- (3)
X105A: Motore A, (4) X105B: Motore B
Collegare il cavo del motore per il servomotore A a X105A e il cavo del motore per il servomotore B a X105B.
- (4)
X9A: Encoder A, (6) X9B: Encoder B
Collegare il cavo dell'encoder A aX9A e il cavo del connettore B a X9B.
Connettori lato superiore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X1: Connettore per comunicazione interna sul modulo alimentatore,(2) X1A: Connettore per comunicazione interna sul modulo azionamento
Collegare X1 e X1A con il cavo di comunicazione RJ11.
- (3)
X6A: Connettore per comunicazione EtherCAT su modulo azionamento
Collegare un cavo Ethernet tra il connettore EtherCAT dell'host controller e il X6A del modulo azionamento.
In questo esempio definiremo X103 come connettore EtherCAT.
Connettori lato anteriore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X7: Connettore USB (per configurazione azionamento) o modulo azionamento
Il modulo azionamento viene configurato utilizzando il software di configurazione PC PANATERM. Utilizzare un comune cavo da USB A a mini USB B per collegare il PC al modulo azionamento.
- (2)
X104: Connettori bus DC link su modulo alimentatore e modulo azionamento (da535V DC a 675V DC), (3) X12: Connettori bus di controllo (24V DC) su modulo alimentatore e modulo azionamento
Collegare le barre del bus a X104 e X12 per collegare i circuiti DC del modulo alimentatore e del modulo azionamento.
- (4)
Connettori per circuiti DC senza e con barre del bus
Connettori dell'host controller Beckhoff C6015
L'immagine mostra la vista frontale dell'host controller. Il connettore X104 può essere utilizzato per collegare un monitor. I connettori X105 e X106 possono essere utilizzati per collegare una tastiera, un mouse o una chiavetta USB, se richiesto.

- (1)
X101: Alimentazione 24V
Collegare X101 a 24V DC.
- (2)
X102: Connettore Ethernet
Collegare un cavo Ethernet tra X102 e la porta Ethernet del proprio PC.
- (3)
X103: Connettore Ethernet
Collegare un cavo Ethernet tra X103 e il connettore X6A del modulo azionamento.
In questo esempio definiremo X103 come connettore EtherCAT.
- (4)
X104: Connettore DisplayPort
Collegare un monitor (facoltativo).
- (5)
X105: Connettore USB 2.0
Connettere un mouse o una tastiera (facoltativo).
- (6)
X106: Connettore USB 3.0
Connettere un mouse o una tastiera (facoltativo).
Impostare l'host controller
Installare TwinCAT 3 Runtime e stabilite un collegamento Ethernet
Per installare TwinCAT 3 Runtime sull'host controller, collegare un monitor al connettore DisplayPort (X104) dell'host controller Beckhoff C6015 e un mouse a uno dei suoi connettori USB.
Il link per il download si trova su Software disponibile.
Installare il driver EtherCAT
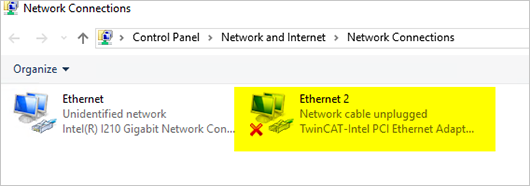
Uno dei due connettori Ethernet dell'host controller Beckhoff C6015 deve essere configurato come una porta EtherCAT. In questo esempio utilizzeremo il connettore X103.
- Nel sistema operativo dell'host controller selezionare (Ethernet2 refers to the X103 connector of the host controller).
Impostare il sistema di servoazionamento MINAS A6 Multi
Utilizzare il software di configurazione PC PANATERM per impostare il sistema di servoazionamento MINAS A6 Multi.
I link per il download si trovano su Software disponibile.
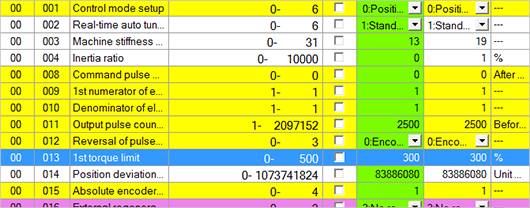
Per motivi di sicurezza, il parametro Pr0.13: 1st torque limit è impostato per default al 10% della coppia nominale. Per poter utilizzare tutta la coppia ed evitare successivi errori, impostare Pr0.13 al 300%. Questa sarà l'unica impostazione che effettueremo in PANATERM.
- Selezionate la scheda Parameter.
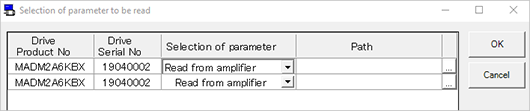
- Nella finestra di dialogo Selection of parameter to be read, selezionare Read from amplifier e selezionare OK.
- Selezionare Pr0.13: 1st torque limit dall'elenco dei parametri e modificare il valore a 300%:
- Trasferire il nuovo valore al driver selezionando l'icona Trans:

Avviare il controllo dell'azionamento
Installare TwinCAT 3 Engineering sul proprio PC
Per controllare il sistema di servoazionamento è necessario installare il software TwinCAT 3 Engineering e il file ESI Panasonic sul proprio PC.
Suggeriamo caldamente di utilizzare un PC senza software di sicurezza (p.es. McAfee) perché TwinCAT 3 Engineering deve poter accedere al kernel. I controlli di sicurezza potrebbero causare errori dello schermo blu e danneggiare i vostri file.
- Decomprimere il pacchetto software scaricato ed eseguire il file di installazione.
- Riavviare il PC.
- Dopo il riavvio copiare il file ESI Panasonic (Panasonic_MINAS_A6Multi_V*.xml) su C:\TwinCAT\3.1\Config\Io\EtherCAT nel vostro PC.
I link per il download si trovano su Software disponibile.
Prima di avviare TwinCAT 3
- Prima di avviare il software TwinCAT 3 Engineering eseguire il file batch C:\TwinCAT\3.1\System\win8settick.bat per evitare un errore di set up dell'orologio del sistema. Questo file deve essere eseguito come amministratore.
- Riavviare il PC.
Creare un nuovo progetto TwinCAT
Prima di poter collegare il proprio PC all'host controller Beckhoff C6015, è necessario creare un nuovo progetto in TwinCAT 3.
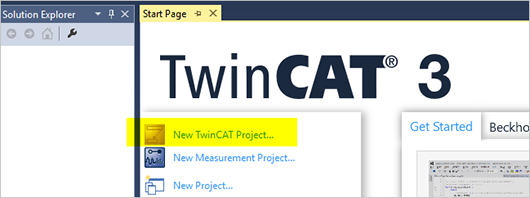
- Selezionare l'icona TwinCAT nella barra delle attività per avviare il software TwinCAT 3 Engineering.

- Su Start Page selezionareNew TwinCAT Project….
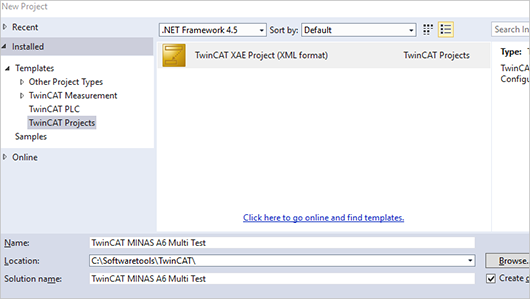
- Selezionare TwinCAT XAE Project (XML format), inserire un progetto e selezionare OK.
Collegare il PC all'host controller
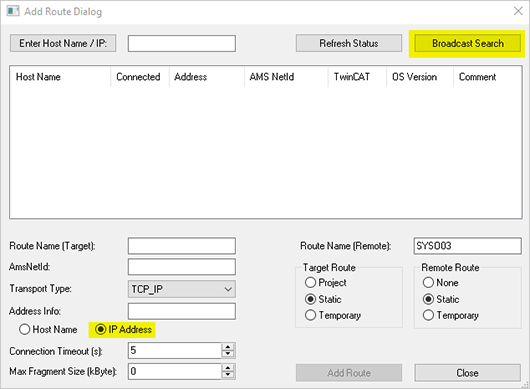
Per stabilire una connessione con l'host controller Beckhoff C6015, inviare una richiesta di broadcast per un indirizzo IP ai dispositivi nel network EtherCAT.
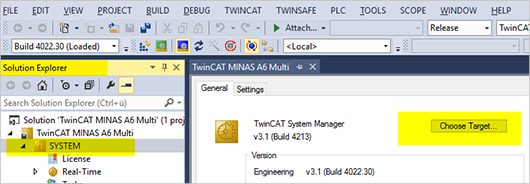
- In Solution Explorer, andare a SYSTEM e selezionare il pulsante Choose Target.
- Selezionare Search (Ethernet).
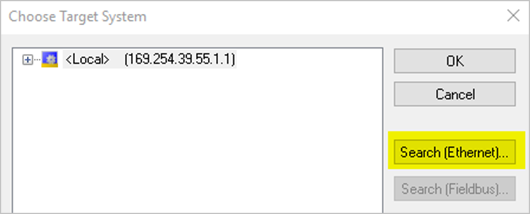
- Alla voce Address Info, selezionareIP Address e selezionare il pulsante Broadcast Search per visualizzare i dispositivi EtherCAT collegati.
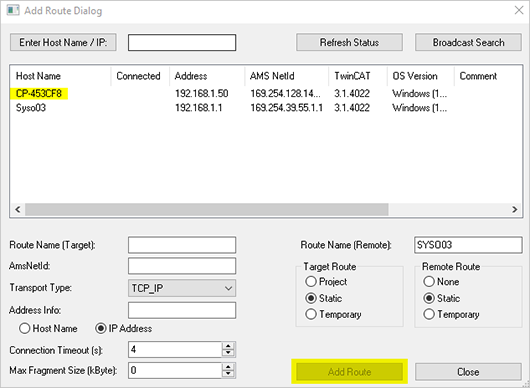
- Selezionare l'host controller e selezionare Add Route.
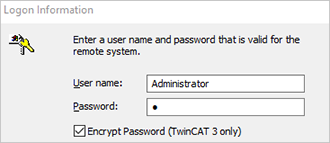
- Inserire i dati di login per l'host controller. La password di default è "1". Selezionare OK.
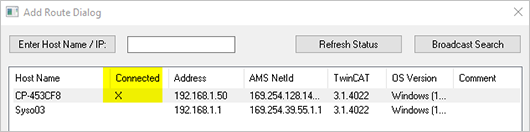
Il sistema stabilisce una connessione con l'host controller.
- Controllare la connessione tra PC e host controller: Una "X" indica che il PC è connesso all'host controller. Selezionare Close per chiudere la finestra e confermare con OK.
Aggiungere dispositivi connessi al proprio progetto
È necessario aggiungere i dispositivi connessi al vostro progetto TwinCAT.
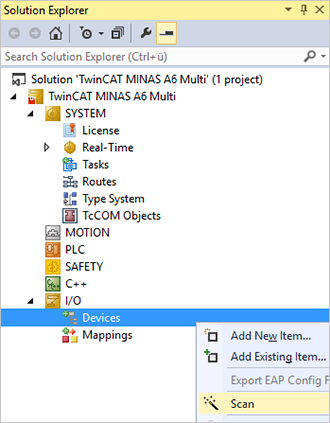
- In Solution Explorer, andare su I/O e fare clic con il tasto destro del mouse su Devices. Selezionare Scan.
- Confermare il messaggio che riporta che non tutti i dispositivi possono essere trovati manualmente.
- Se il dispositivo master EtherCAT è stato trovato, selezionare OK.
- Quando il modulo azionamento MINAS A6 Multi è stato trovato, compare il seguente messaggio, da confermare con OK.

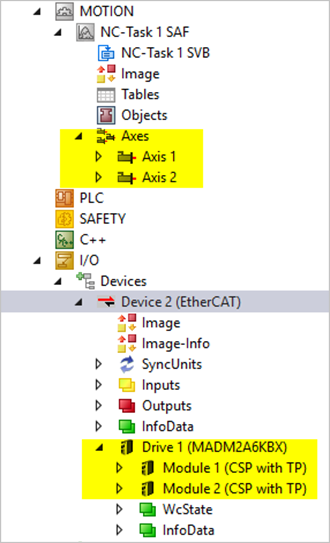
- Solution Explorer visualizza il modulo azionamento aggiunto con i due motori collegati in . Visualizza inoltre tutti gli assi trovati in .
Impostare i parametri di movimento
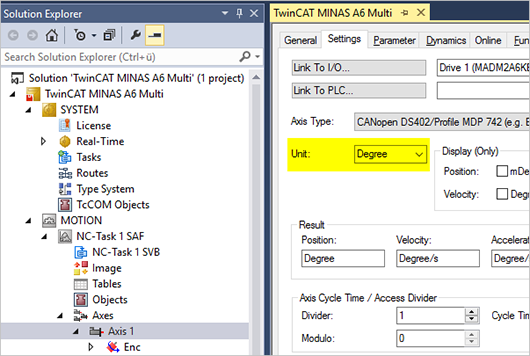
Impostare i parametri di movimento ed eseguire le impostazioni generali e le impostazioni dell'encoder per ogni asse.
- In questo esempio, modificare l'unità in Degree.
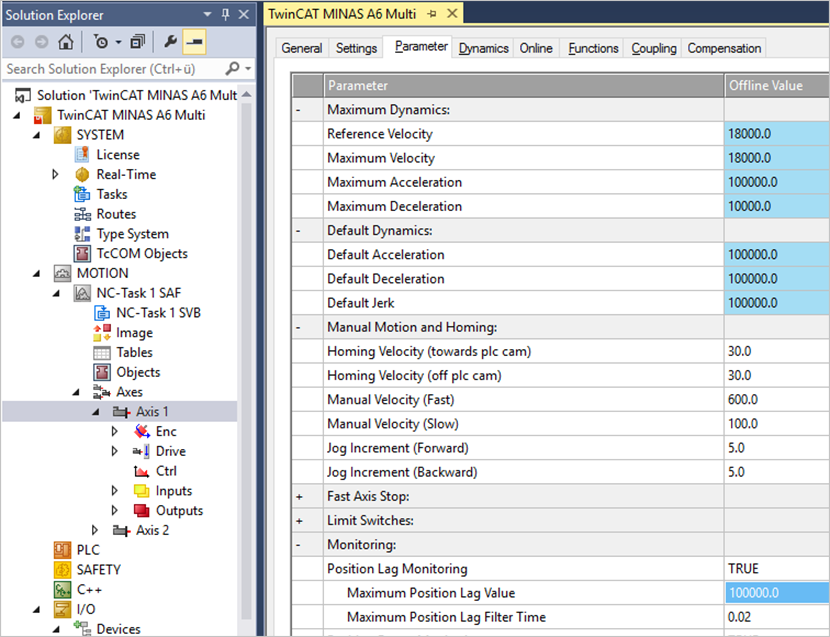
- Selezionare la scheda Parameter e impostare i valori per la velocità, l'accelerazione, la decelerazione, il jerk e l'errore ritardo (segnalati in blu nello screenshot).
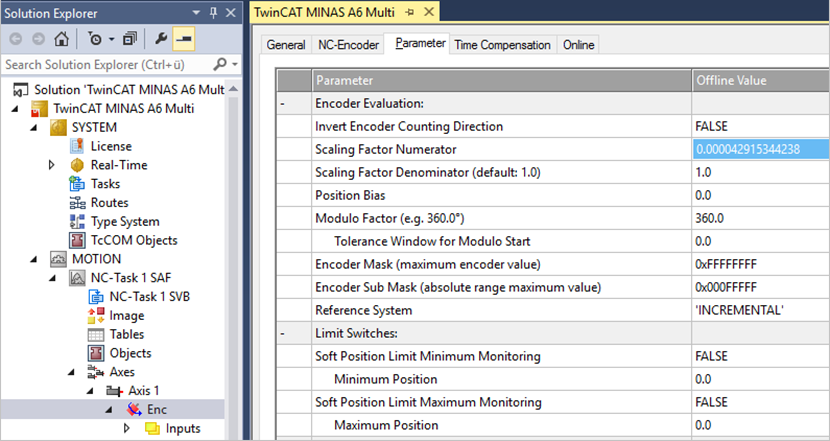
- Impostare il fattore di scala desiderato per l'encoder.
Impostare ad esempio 360°/8388608=0.00004291534423828125 per una rotazione del motore di 8388608 impulsi/rotazioni.
- Selezionare l'icona Activate Configuration dalla barra degli strumenti.

- Confermare il messaggio che indica che la nuova configurazione sarà attivata e le vecchie configurazioni saranno sovrascritte.
- Confermare il messaggio che indica che il sistema TwinCAT verrà riavviato in modalità RUN.
Il sistema TwinCAT è ora in modalità RUN e l'icona corrispondente è attiva.

(Per tornare alla modalità di configurazione, selezionare l'icona blu a destra dell'icona verde).
Avvio controllo posizionamento
Utilizzare la scheda Online per l'avvio manuale e per controllare il movimento del motore.
- Andare su . Selezionate la scheda Online.
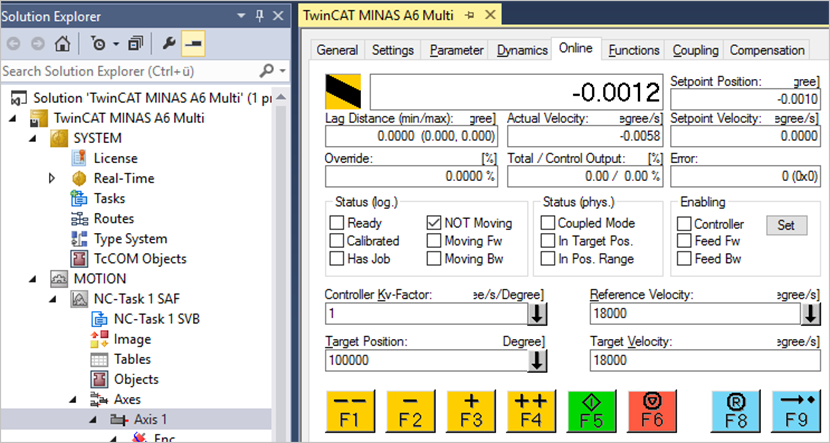
- Selezionare Set e All per attivare il controllo posizionamento.
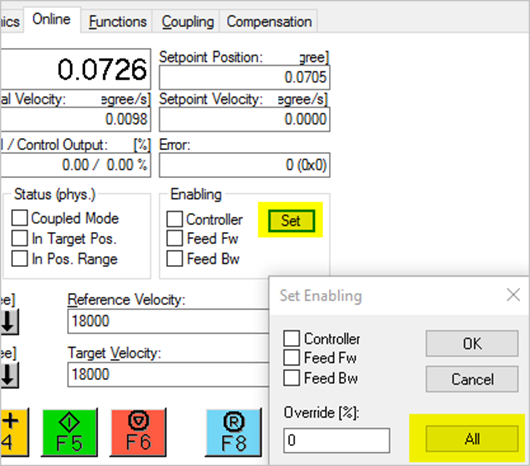
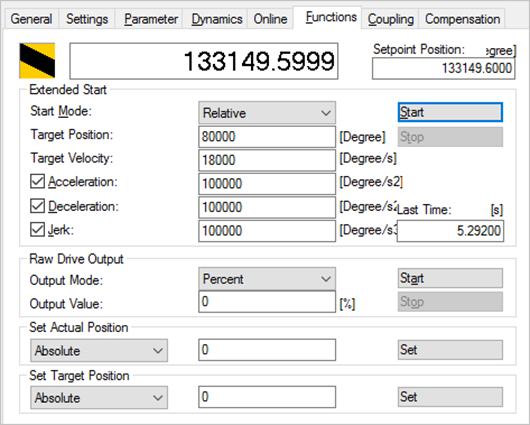
- Dalla scheda Online è possibile ora avviare operazioni JOG, controllo valore assoluto, operazioni di Home Return (ritorno alla posizione iniziale), eccetera.
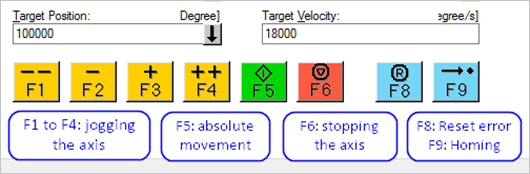
- Dalla scheda Functions è possibile testare il controllo valore relativo, movimento continuo, eccetera, modificando l'accelerazione, la decelerazione e i valori jerk.
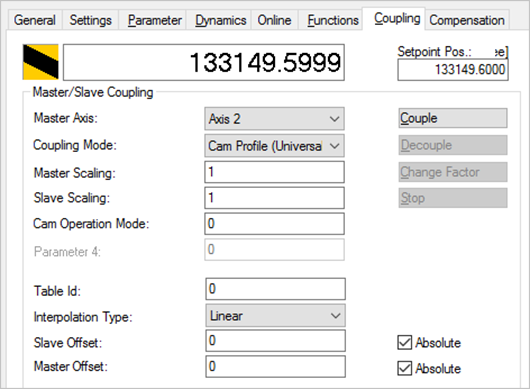
- Utilizzare la scheda Coupling per testare accoppiamento elettronico, profili di camma, taglio al volo, eccetera.
Creare un programma del PLC con funzioni di controllo del movimento (facoltativo)
Per programmare un task di posizionamento, utilizzare una delle librerie presenti in TwinCAT 3.
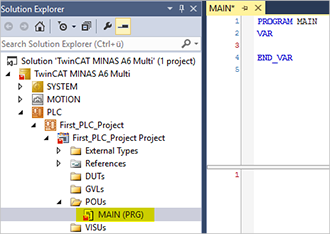
- In Solution Explorer, fare clic col tasto destro del mouse PLC e selezionare Add New Item.
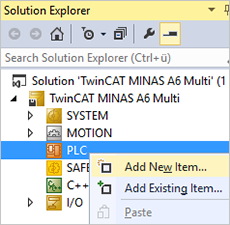
- Selezionare Standard PLC Project, inserire un nome per il nuovo progetto PLC e selezionare Add.

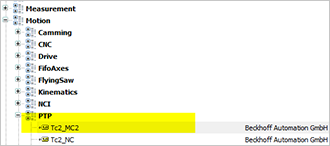
- Andare su . Fare clic col tasto destro del mouse References e selezionare Add library.
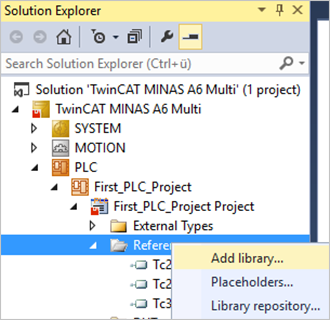
- Aggiungere la libreria Tc2_MC2.
- Andare su .
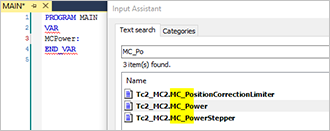
- Selezionare la funzione Tc2_MC2.MC_Power e selezionare OK. Aggiungere poi la struttura AXIS_REF allo stesso modo.
 Il programma di esempio creato dovrebbe avere questo aspetto:
Il programma di esempio creato dovrebbe avere questo aspetto: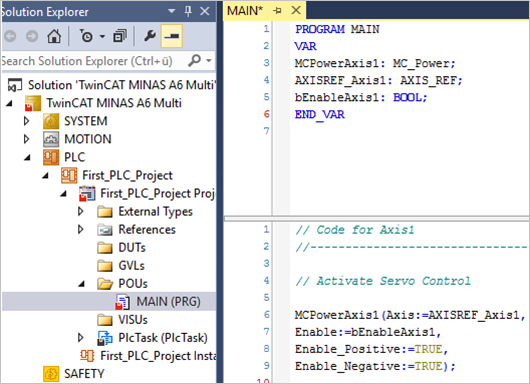
- Selezionare per compilare il progetto.
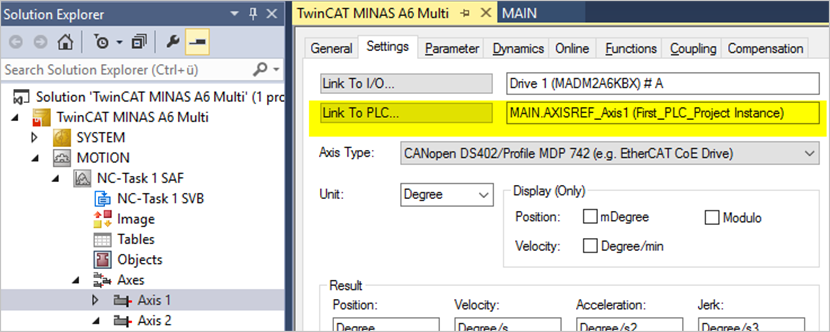
- Assegnare una connessione all' Asse 1. Fare clic sul pulsante Link To PLC... per selezionare la struttura AXISREF_Axis1 dal vostro programma del PLC.
- Attivare la configurazione.
- Confermare il messaggio che indica che il sistema TwinCAT verrà riavviato in modalità RUN.
- Selezionare l'icona Login dalla barra degli strumenti.

- Selezionare Yes per creare la porta 851.
Se si verifica un errore, riprovare selezionando l'icona Login.
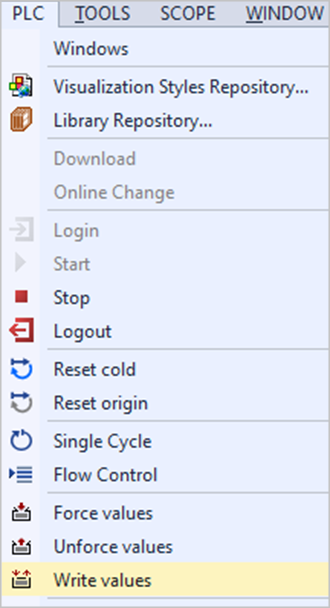
- Selezionare l'icona Start evidenziata per avviare il programma PLC.

- Fare doppio clic sul valore di bEnableAxis1 per impostare la variabile su TRUE.
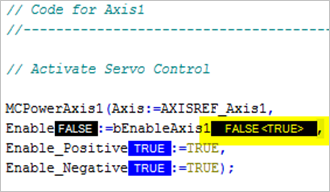
- Selezionare per scrivere il valore e per abilitare il controllo del servo del motore.
Aggiungere controlli visivi al proprio programma del PLC (facoltativo)
Per migliorare il proprio programma del PLC, è possibile aggiungere controlli visivi, p.es. un pulsante per abilitare il controllo del servo.
- Andare su . Fare clic con il tasto destro del mouse su VISUs e selezionare .
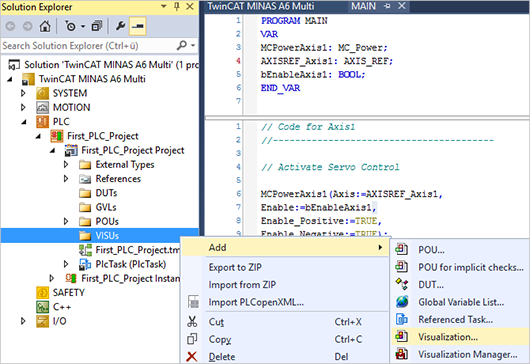
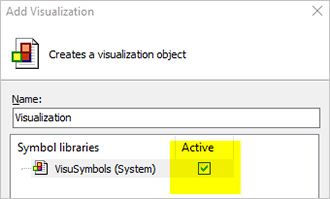
- Selezionare VisuSymbols (System) e poi Open.
- Fare doppio clic su Visualization. Da Toolbox, selezionareRounded Rectangle e posizionare la forma nella schermata Visualization.
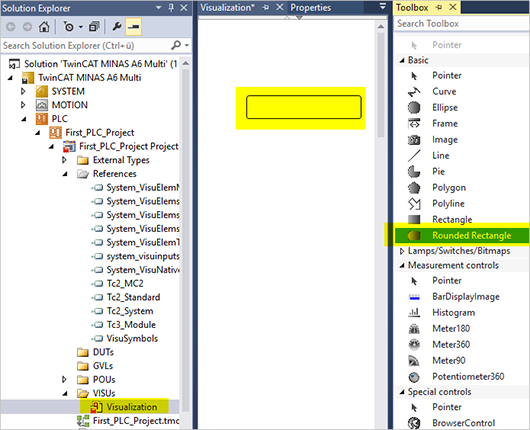
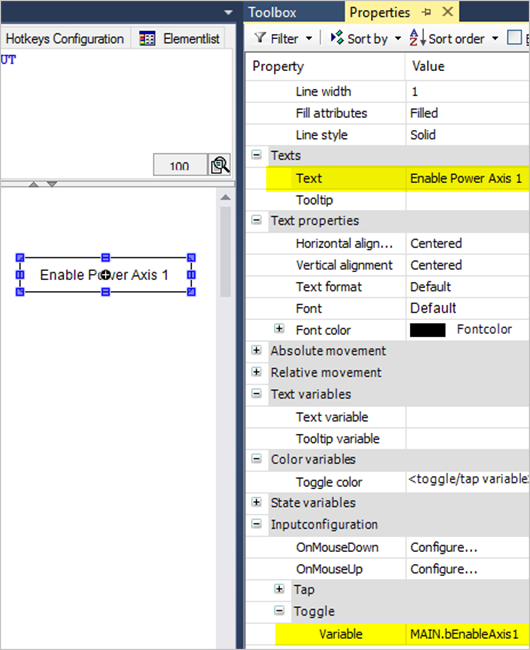
- Utilizzare la finestra Properties per inserire un testo nel rettangolo e aggiungere la variabile bEnableAxis1 dal proprio programma del PLC principale.
- Selezionare l'icona Login dalla barra degli strumenti.
- Se compare il seguente messaggio, selezionare Yes per creare la porta 851.
Se si verifica un errore, riprovare selezionando l'icona Login.
- Avviare il programma del PLC.
- Selezionare Enable Power Axis 1 per abilitare il controllo del servo.
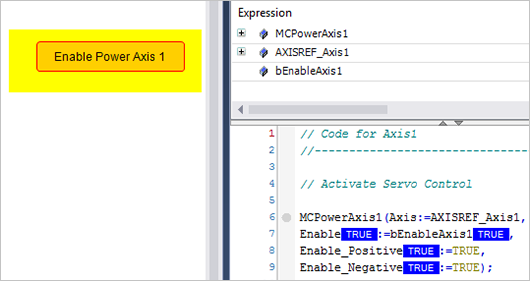 Il controllo del servo per l'asse 1 è ora abilitato.
Il controllo del servo per l'asse 1 è ora abilitato.