Controllo posizionamento con host controller Omron tramite EtherCAT
Prima di iniziare
Prima di utilizzare questo prodotto, leggere le istruzioni di sicurezza nei seguenti manuali:
Il presente prodotto è concepito esclusivamente per uso industriale.
Il cablaggio elettrico deve essere eseguito da personale elettrotecnico qualificato.
Descrizione
Le istruzioni passo a passo vi guideranno durante la connessione di un host controller Omron NX1P2 ad un sistema di servoazionamento MINAS A6 Multi. Imparerete inoltre come programmare un semplice task di posizionamento nel software Sysmac Studio di Omron. La comunicazione avviene tramite EtherCAT.
Software disponibile
Il seguente software è disponibile gratuitamente nell'area Download di Panasonic.
Il seguente software può essere scaricato dal sito web di Omron (https://www.omron.eu./en/home):
Software Sysmac Studio
Visione d'insieme delle funzioni
Un sistema di servoazionamento Panasonic MINAS A6 Multi comprende un modulo alimentatore, uno o più moduli azionamento da 400V e uno o due motori collegati a ciascun modulo azionamento. La comunicazione può essere realizzata tramite EtherCAT con qualsiasi host controller che supporti il protocollo applicativo CAN su EtherCAT (CoE).
Esempio
Un sistema di servoazionamento composto da un modulo alimentatore da 15kW un modulo azionamento a due assi taglia A da 1,5kW e due servomotori con una potenza nominale di 1,0kW e 1,5kW, viene collegato a un host controller Omron NX1P2 tramite un cavo Ethernet per permettere la comunicazione via EtherCAT.
Utilizzare i seguenti accessori:
1 cavo di alimentazione da 400V AC: Collega il modulo alimentatore MINAS A6 Multi all'alimentazione principale (400V AC).
1 cavo di alimentazione da 24V DC: Collega l'alimentazione (24V DC) e l'host controller.
1 cavo di messa a terra (terminale a crimpare ad anello M4): Collega i morsetti di terra del modulo alimentatore e il modulo azionamento.
2 cavi del motore Panasonic: Collega il motore e il modulo azionamento.
2 cavi encoder Panasonic: Collega l'encoder e il modulo azionamento.
1 cavo Ethernet: Collega il PC e l'host controller.
1 cavo Ethernet (utilizzato per comunicazione EtherCAT): Collega l'host controller e il modulo azionamento.
1 cavo comunicazione RJ11 (2 spine RJ11): Collega il modulo alimentatore e il modulo azionamento.
1 barra alimentatore bus (50mm) con terminale per bus DC link (da535V DC a 675V DC): Collega il modulo alimentatore e il modulo azionamento.
1 barra alimentatore bus (50mm) con terminale per bus di controllo (24V DC): Collega il modulo alimentatore e il modulo azionamento.

- (1) Alimentazione (24V DC)
- (2) Host controller Omron NX1P2
- (3) Modulo alimentatore MINAS A6 Multi (400V AC, 15kW)
- (4) Modulo azionamento a due assi MINAS A6 Multi (1,5kW)
- (5) Servomotore B (1,5kW) MINAS A6
- (6) Servomotore A (1kW) MINAS A6
- (7) PC con Sysmac Studio
Cablaggio
Raccomandazioni per il cablaggio
L'utente è responsabile per l'attuazione delle misure necessarie e per il rispetto delle norme attualmente vigenti su cablaggi e sicurezza e delle direttive EMC/CEM.
Tenete conto dei dati tecnici riportati nei manuali sull'hardware di ognuno dei dispositivi da cablare. Se i dati riportati nel manuale non coincidono con le informazioni di questo documento, valgono i dati del produttore.
Per informazioni particolareggiate sulla riduzione di emissioni di disturbo si prega di consultare le Raccomandazioni sul cablaggio di servoazionamenti e servomotori per la EMC.
Connettori lato inferiore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X102: Alimentazione principale (400V AC)
Collegare il cavo di alimentazione principale 400V AC a X102. Collegare i morsetti di terra del modulo alimentatore e del modulo azionamento tramite un cavo di messa a terra.
- (2)
X11: Alimentazione di controllo (24V DC)
Collegare l'alimentazione di controllo 24V DC a X11.
- (3)
X105A: Motore A, (4) X105B: Motore B
Collegare il cavo del motore per il servomotore A a X105A e il cavo del motore per il servomotore B a X105B.
- (4)
X9A: Encoder A, (6) X9B: Encoder B
Collegare il cavo dell'encoder A aX9A e il cavo del connettore B a X9B.
Connettori lato superiore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X1: Connettore per comunicazione interna sul modulo alimentatore,(2) X1A: Connettore per comunicazione interna sul modulo azionamento
Collegare X1 e X1A con il cavo di comunicazione RJ11.
- (3)
X6A: Connettore per comunicazione EtherCAT su modulo azionamento
Collegare un cavo Ethernet tra il connettore EtherCAT dell'host controller e il X6A del modulo azionamento.
Connettori lato anteriore dei sistemi di servoazionamento
L'immagine mostra i connettori più importanti di un modulo alimentatore (a sinistra) e di un modulo azionamento (a destra). Fare riferimento alla documentazione tecnica per dettagli relativi ad altri connettori.

- (1)
X7: Connettore USB (per configurazione azionamento) o modulo azionamento
Il modulo azionamento viene configurato utilizzando il software di configurazione PC PANATERM. Utilizzare un comune cavo da USB A a mini USB B per collegare il PC al modulo azionamento.
- (2)
X104: Connettori bus DC link su modulo alimentatore e modulo azionamento (da535V DC a 675V DC), (3) X12: Connettori bus di controllo (24V DC) su modulo alimentatore e modulo azionamento
Collegare le barre del bus a X104 e X12 per collegare i circuiti DC del modulo alimentatore e del modulo azionamento.
- (4)
Connettori per circuiti DC senza e con barre del bus
Connettori dell'host controller Omron NX1P2
L'immagine mostra la vista frontale dell'host controller.

- (1)
Alimentazione 24V DC
Collegare questo connettore a 24V DC.
- (2)
Connettore PORT1 EtherNet/IP
Collegare un cavo Ethernet tra questo connettore e la porta Ethernet del proprio PC.
- (3)
Connettore PORT2 EtherCAT
Collegare un cavo Ethernet tra questo connettore e il connettore X6A del modulo azionamento.
Creare un progetto in Sysmac Studio
Installare Sysmac Studio sul proprio PC
Il sistema di servoazionamento è controllato con il software Sysmac Studio di Omron. Installare questo software e il file ESI Panasonic sul proprio PC.
- Scaricare il software Sysmac Studio dal sito web di Omron ed eseguire il file di installazione.
- Copiare il file ESI Panasonic (Panasonic_MINAS_A6Multi_V*.xml) su C:\Program Files (x86)\OMRON\Sysmac Studio\IODeviceProfiles\EsiFiles\ UserEsiFiles sul vostro PC.
- Riavviare Sysmac Studio.
I link per il download si trovano su Software disponibile.
Creare un nuovo progetto in Sysmac Studio
Prima di poter collegare il proprio PC all'host controller Omron NX1P2, è necessario creare un nuovo progetto in Sysmac Studio.
- Selezionare Sysmac Studio tramite l'icona presente sul desktop per avviare il software.

- Su Start Page, selezionareNew Project.
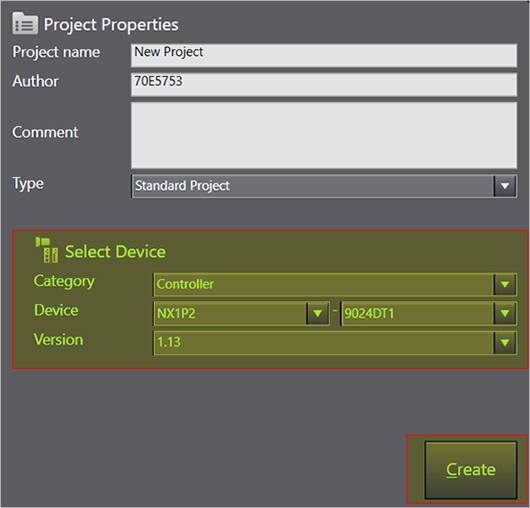
- Selezionare il dispositivo e il numero di versione (vedere etichetta dell'host controller) e poi Create.
- Selezionate . Fare doppio clic sul modulo azionamento da collegare.
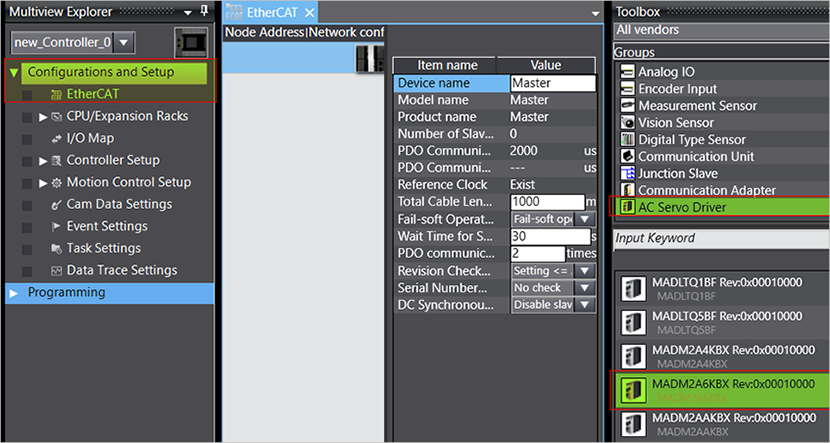 Il modulo azionamento è ora collegato al master (host controller).
Il modulo azionamento è ora collegato al master (host controller).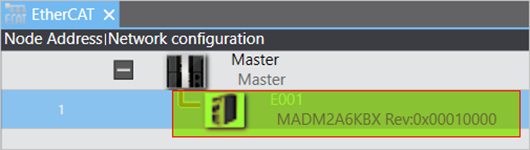
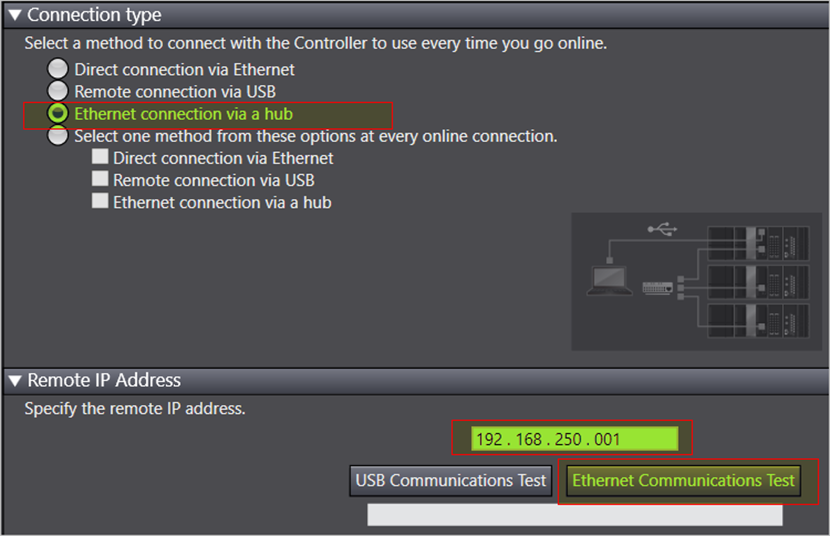
- Selezionare per stabilire un collegamento Ethernet.

- Selezionare il metodo di collegamento Ethernet connection via a hub e inserire l'indirizzo IP di default 192.168.250.001 per l'host controller.Verificare che il proprio PC utilizzi un indirizzo IP nella stessa sottorete, p.es. 192.168.250.50.Per verificare la comunicazione, selezionare Ethernet Communication Test. Se viene visualizzatoTest OK, la comunicazione è attiva.Selezionare OK per salvare le impostazioni.
- Selezionare il triangolo giallo nella barra degli strumenti per andare online.
 Quando l'host controller è in modalità RUN, il nuovo stato viene visualizzato in basso a destra.
Quando l'host controller è in modalità RUN, il nuovo stato viene visualizzato in basso a destra.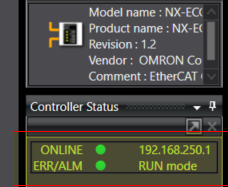
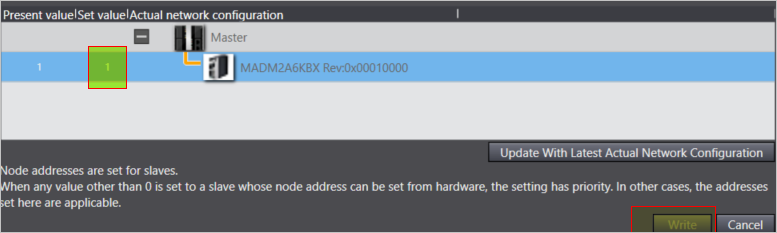
- Fare clic con il tasto destro del mouse sul master e selezionare Write Slave Node Address per impostare l'indirizzo del nodo del modulo azionamento.
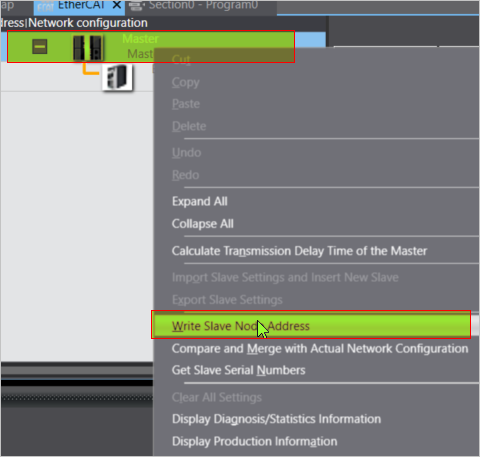
- Impostare un indirizzo del nodo dello slave, p.es. 1, e selezionare Write.
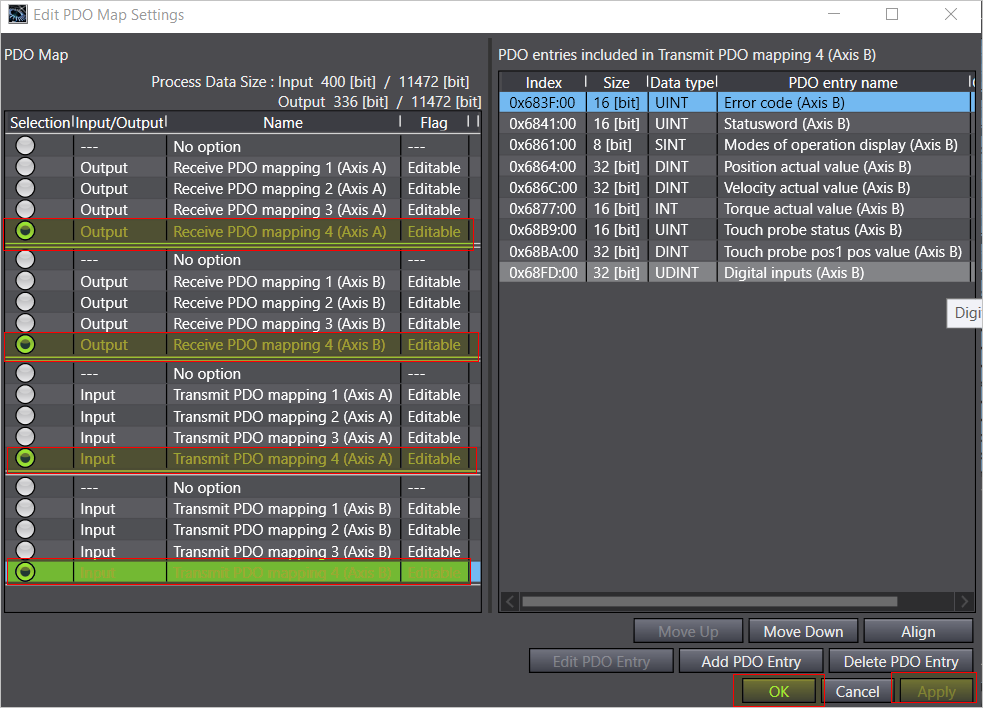
- Dopo il riavvio, restare in modalità offline. Selezionare il modulo azionamento e poi Edit PDO Map Settings per selezionare le mappature del PDO per la propria applicazione.
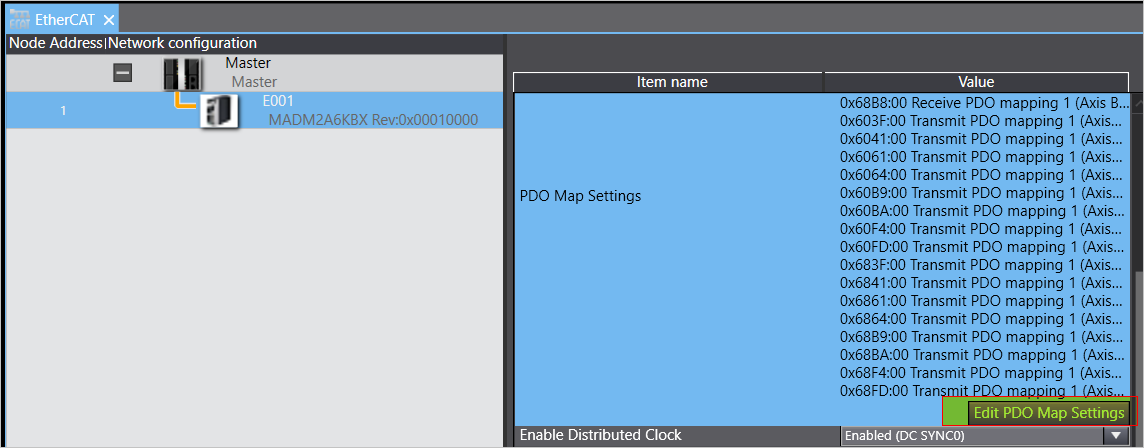
- Selezionare ad esempio PDO mapping 4 e poi Apply e OK.
Configurazione asse
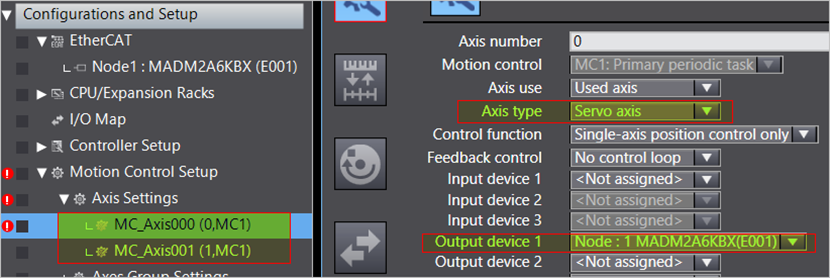
- Selezionare per aggiungere un asse.
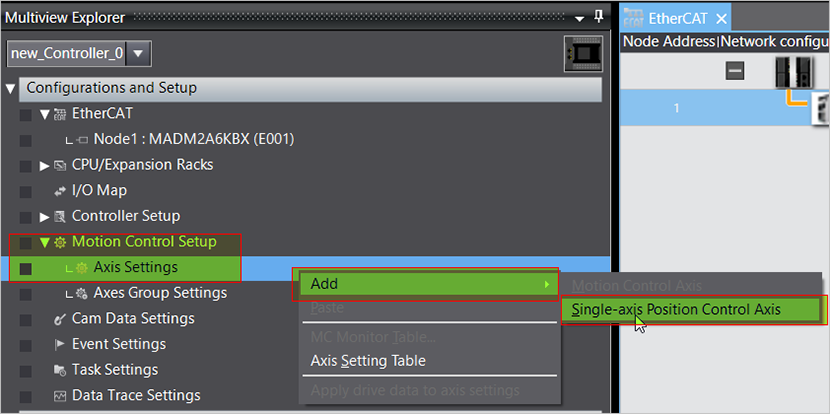
- Per Axis type, selezionare Servo axis e per Output device 1, selezionare MADM2A6KBX(E001).
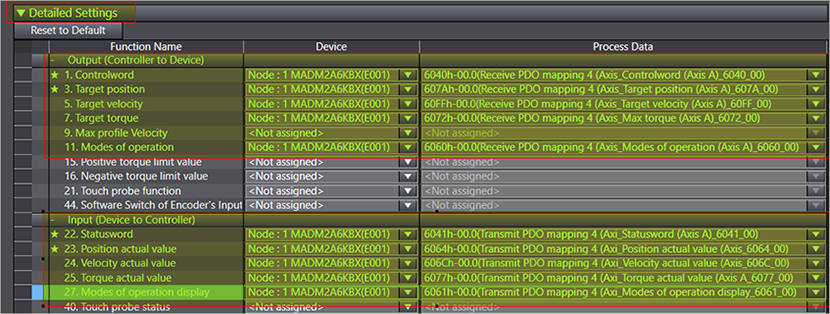
- Andare alla scheda Detailed Settings per mappare gli oggetti dei dati di processo (PDO) sulle variabili NX1P2.
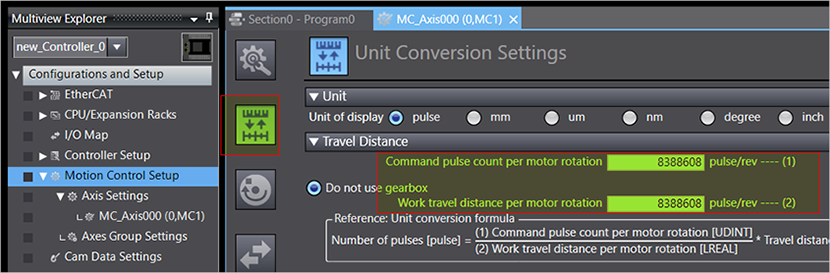
- Impostare l'impulso di comando e la distanza percorsa per rotazione del motore.I motori della serie MINAS A6 Multi hanno una risoluzione dell'encoder di 23 bit (8388608 impulsi).
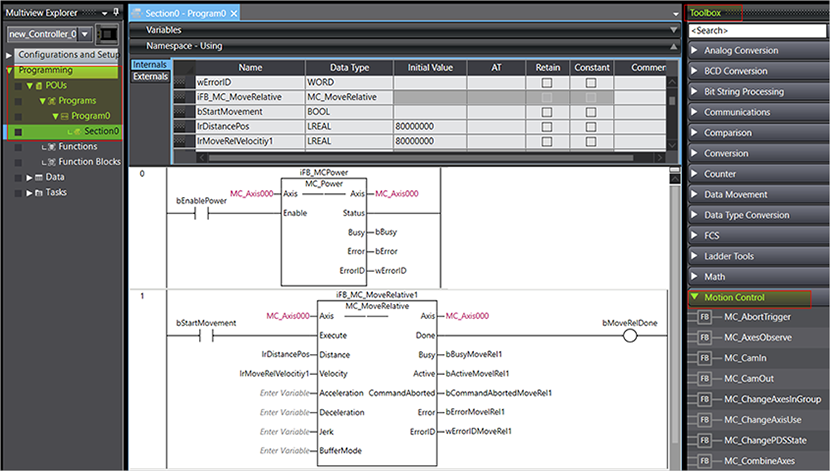
Programmare un semplice task di posizionamento
Scaricare e avviare il progetto
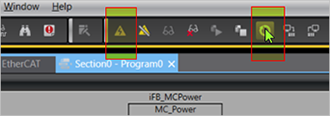
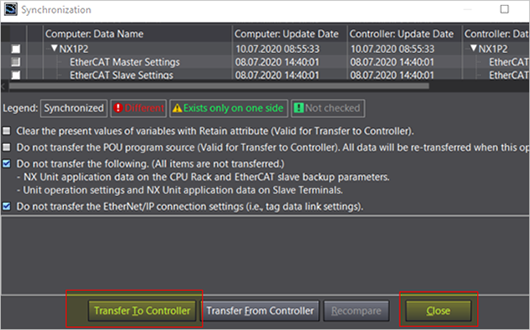
- Selezionare il triangolo giallo nella barra degli strumenti per andare online e poi selezionare Synchronize per sincronizzare tutto il progetto.
- Selezionare Transfer to Controller e Close quando il trasferimento è stato completato.
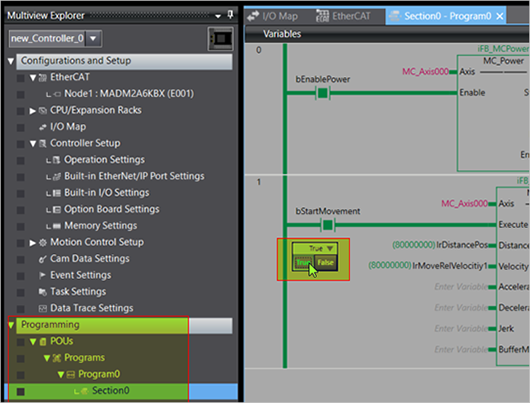
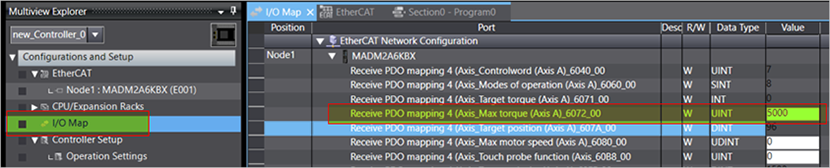
- Selezionare I/O Map e impostare una coppia massima di 5000 (unità0,1%) per asse A.
- Portare la variabile bEnablePower suTRUE per abilitare il controllo del servo. Portare bStartMovement suTRUE per avviare la modalità di controllo relativo dell'asse.