


 FP_POS_UNIT_SET_TABLE
FP_POS_UNIT_SET_TABLEVerfahrsatz einstellen
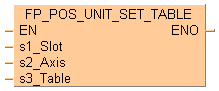
Dieser FP-Befehl startet die Positionierung des Positioniermoduls am durch s1_Slot festgelegten Steckplatz und für die durch s2_Axis festgelegte Achse entsprechend des in s3_Table eingestellten Verfahrsatzes, wenn der Trigger EN auf TRUE gesetzt ist. Konfigurieren Sie den Verfahrsatz in Configurator PM7.
Eingang
Steckplatznummer
Achsennummer
Werte: 1–4, 8 (virtuelle Achse)
Nummer des Verfahrsatzes
Werte: 1–600, 10001–10025
wenn der mit dem Index-Modifizierer definierte Bereich größer ist als der zulässige Bereich
wenn die Steckplatz- und/oder Achsennummer ungültig ist
wenn der mit dem Index-Modifizierer definierte Bereich größer ist als der zulässige Bereich
wenn die Steckplatz- und/oder Achsennummer ungültig ist
In der globalen Variablenliste können Sie Variablen festlegen, die von allen POEs des Projekts verwendet werden können.

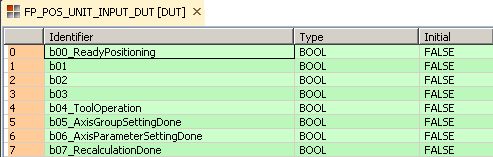
Eingang
Ausgang
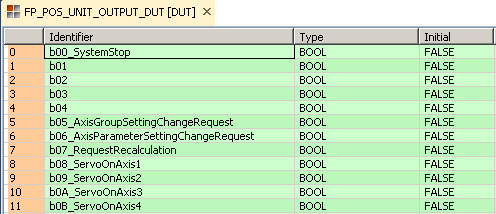
Kopieren Sie den SDT in die Zwischenablage und fügen Sie ihn direkt in den SDT-Pool des Navigators ein, um diesen SDT in Ihrem Programm zu verwenden.
Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.
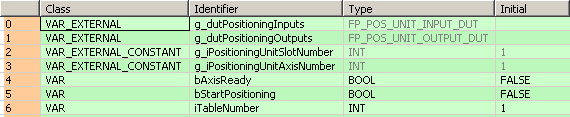
Wenn die Variable bStart von FALSE auf TRUE gesetzt wird, wird die Funktion ausgeführt.
VAR_EXTERNAL
g_dutPositioningInputs: FP_POS_UNIT_INPUT_DUT;
g_dutPositioningOutputs: FP_POS_UNIT_OUTPUT_DUT;
END_VAR
VAR_EXTERNAL CONSTANT
g_iPositioningUnitSlotNumber: INT:=1;
g_iPositioningUnitAxisNumber: INT:=1;
END_VAR
VAR
bAxisReady: BOOL:=FALSE;
bStartPositioning: BOOL:=FALSE;
iTableNumber: INT:=1;
@'': @'';
END_VAR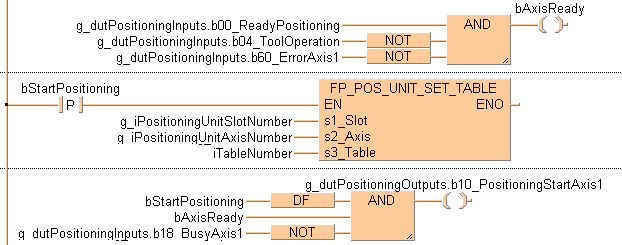
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,g_dutPositioningInputs.b00_ReadyPositioning,21,1,23,3,);
B(B_VARIN,,g_dutPositioningInputs.b04_ToolOperation,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b60_ErrorAxis1,21,3,23,5,);
B(B_F,NOT!,,23,2,28,4,,?D?C);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,bAxisReady,43,1,45,3,);
L(23,2,28,2);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,bStartPositioning,5,1,7,3,R);
B(B_F,FP_POS_UNIT_SET_TABLE!,,25,0,38,6,,?DEN?Ds1_Slot?Ds2_Axis?Ds3_Table?AENO);
B(B_VARIN,,g_iPositioningUnitSlotNumber,23,2,25,4,);
B(B_VARIN,,g_iPositioningUnitAxisNumber,23,3,25,5,);
B(B_VARIN,,iTableNumber,23,4,25,6,);
L(1,2,5,2);
L(7,2,25,2);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,bStartPositioning,21,1,23,3,);
B(B_VARIN,,bAxisReady,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b18_BusyAxis1,21,3,23,5,);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,g_dutPositioningOutputs.b10_PositioningStartAxis1,43,1,45,3,);
B(B_F,DF!,,23,0,28,3,,?Di?Co);
L(23,3,28,3);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYIf (g_dutPositioningInputs.b00_ReadyPositioning AND NOT g_dutPositioningInputs.b04_ToolOperation
AND NOT g_dutPositioningInputs.b60_ErrorAxis1) then
bAxisReady:=TRUE;
End_if;
If (bStart) then
FP_POS_UNIT_SET_TABLE(s1_Slot := g_iPositioningUnitSlotNumber,
s2_Axis := g_iPositioningUnitAxisNumber,
s3_Table := iTableNumber);
End_if;
If DF((bStart) AND bAxisReady Then AND NOT g_dutPositioningInputs.b18_BusyAxis1) then
g_dutPositioningOutputs.b10_PositioningStartAxis1:=TRUE;
End_if;