


 TON
TONEinschaltverzögerung
Mit dem Funktionsbaustein TON können Sie eine Einschaltverzögerung programmieren.
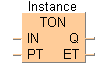
Eingang
Zeitgeber TRUE
bei jeder steigenden Flanke an IN wird ein interner Zeitmesser gestartet
Einschaltverzögerung (PT = preset time)
16 Bit: 0–327.27s
32 Bit: 0–21,474,836.47s (32 Bit nicht verfügbar für FP3, FPC, FP5, FP10/10S)
Auflösung jeweils 10ms
Ausgang
Signalausgang
wird auf TRUE gesetzt, wenn PT = ET ist
Istwert
ist die tatsächlich abgelaufene Zeit (ET = elapsed time)
Der Wert kann während des Zählens geändert werden, indem aus dem Programmiereditor heraus in die Variable geschrieben wird.
Q wird um die Zeit, die in PT definiert worden ist, verzögert gesetzt. Das Zurücksetzen verläuft verzögerungsfrei.
Wenn der Eingang IN nur so lange oder gar kürzer gesetzt wird, als die Verzögerungszeit PT dauert (t3 - t2 < PT), dann wird Q nicht gesetzt.


Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.
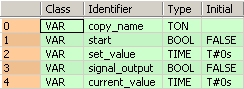
VAR
copy_name: TON;
start: BOOL:=FALSE;
set_value: TIME:=T#0s;
signal_output: BOOL:=FALSE;
current_value: TIME:=T#0s;
END_VARWenn start gesetzt wird (Status = TRUE), wird das Eingangssignal um die Zeitspanne set_value verzögert an signal_output weitergegeben.

BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,start,3,2,5,4,);
B(B_VARIN,,set_value,7,3,9,5,);
B(B_VAROUT,,current_value,14,3,16,5,);
B(B_COIL,,signal_output,21,2,23,4,);
B(B_FB,TON!,copy_name,9,1,14,5,,?BIN?BPT?AQ?AET);
L(1,3,3,3);
L(1,0,1,6);
L(5,3,9,3);
L(14,3,21,3);
END_NETWORK_BODY
END_NET_WORK
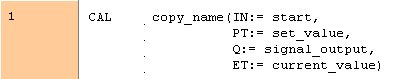
END_BODYcopy_name( IN:= start ,
PT:= set_value ,
Q=> signal_output ,
ET=> current_value );Wenn Sie den Funktionsbaustein in einer Anweisungsliste aufrufen möchten, geben Sie folgendes ein:
Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden.Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.
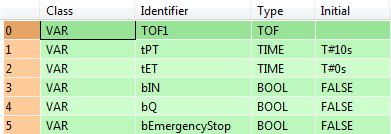
VAR
TOF1: TOF;
tPT: TIME:=T#10s;
tET: TIME:=T#0s;
bIN: BOOL:=FALSE;
bQ: BOOL:=FALSE;
bEmergencyStop: BOOL:=FALSE;
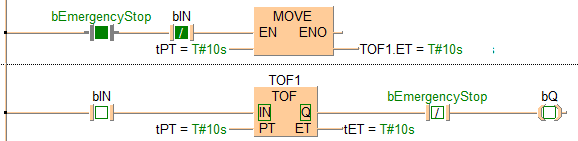
END_VARNach einer fallenden Flanke an bIN beginnt der Zeitgeber mit dem Zählen und Q wird auf TRUE gesetzt. Wenn bEmergencyStop auf TRUE gesetzt wird, bevor der Zeitgeberwert abgelaufen ist, wird der Zählvorgang gestoppt und der Ausgang Q sofort zurückgesetzt. Der Zeitgeber wird in diesem Beispiel mit der programmierten Zeit PT von 10s initialisiert.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_F,E_MOVE!,,16,0,22,4,,?DEN?D?AENO?C);
B(B_VARIN,,tPT,14,2,16,4,);
B(B_VAROUT,,TOF1.ET,22,2,24,4,);
B(B_CONTACT,,bIN,11,1,13,3,N);
B(B_CONTACT,,bEmergencyStop,6,1,8,3,);
L(1,2,6,2);
L(13,2,16,2);
L(8,2,11,2);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_FB,TOF!,TOF1,16,1,21,5,,?BIN?BPT?AQ?AET);
B(B_VARIN,,tPT,14,3,16,5,);
B(B_VAROUT,,tET,21,3,23,5,);
B(B_CONTACT,,bIN,6,2,8,4,);
B(B_COIL,,bQ,34,2,36,4,);
B(B_CONTACT,,bEmergencyStop,27,2,29,4,N);
L(21,3,27,3);
L(29,3,34,3);
L(8,3,16,3);
L(1,3,6,3);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYif (bEmergencyStop AND NOT bIN) then
TOF1.ET:=tPT;
end_if;
TOF1(IN := bIN, PT := tPT, ET => tET);
bQ := NOT bEmergencyStop AND TOF1.Q;