


 PulseOutput_Home_FB
PulseOutput_Home_FBHome Return (ritorno alla posizione iniziale)
Questa istruzione esegue un Home Return (ritorno alla posizione iniziale) secondo i parametri nel Function Block e nella DUT specificata. Gli impulsi vengono emessi dal canale specificato quando il flag di controllo per tale canale è FALSE e la condizione di esecuzione è TRUE.
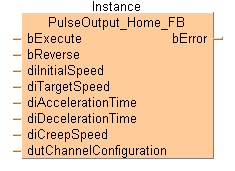
Ingresso
Un fronte di salita attiva il Function Block
Direzione movimento: Avanti = FALSE, Inverso = TRUE
Velocità iniziale/Velocità target: Impostate questo valore secondo il campo di frequenza selezionato in PulseOutput_Channel_Configuration_DUT:
FPS, FP-X: 1 a 9800 (1,5Hz–9,8kHz)
48 a 100000 (48Hz–100kHz)
191 a 100000 (191–100kHz)
F171_PulseOutput_Trapezoidal: 1 a 50000 (1Hz–50kHz)
FP0, F168_PulseOutput_Trapezoidal: 40 a 5000 (40Hz–5kHz)
Tempo di accelerazione/decelerazione (FPS, FP-X):
Con 30 passi: 30ms–32760ms (specificare in passi di 30)
Con 60 passi: 60ms–32760ms (specificare in passi di 60)
Tempo di accelerazione/decelerazione (FP0, F168_PulseOutput_Trapezoidal): 30ms–32760ms
Tempo di accelerazione (F171_PulseOutput_Trapezoidal): 1ms–32760ms
Tempo di decelerazione (F171_PulseOutput_Trapezoidal): 1ms–32760ms
Velocità di ricerca (F171_PulseOutput_Trapezoidal): 1 a 50000 (1Hz–50kHz)
Uscita
TRUE se un valore di ingresso applicato non è valido. L'esecuzione del Function Block si arresta.
Questa istruzione non in linea è parte delle istruzioni TOOL per uscita ad impulsi. Per una descrizione dettagliata delle istruzioni utilizzate internamente, vedere:
FPS, FP-X: F171_PulseOutput_Home
FP-e, FP0: F168_PulseOutput_Home
Utilizzate PulseInfo_IsActive per controllare che il flag di controllo per il canale selezionato sia FALSE.Utilizzate PulseInfo_IsHomeInputTrue per controllare che l'ingresso home sia TRUE.
Evitate malfunzionamenti o un errore di funzionamento:
Assicuratevi di impostare il registro di sistema in modalità uscita ad impulsi quando utilizzate un ingresso home.
L'ingresso home non deve essere occupato da altre istruzioni quali ingresso cattura impulsi, ingresso di interrupt o contatore veloce.
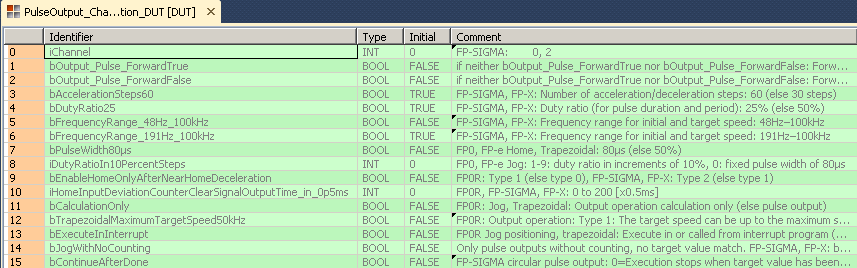
Con un tipo unità dati (DUT) è possibile definire un tipo unità dati composto da altri tipi di dati. Una DUT è definita prima di tutto nel gruppo DUT e poi elaborata come i tipi di dati standard (BOOL, INT, ecc.) nella lista delle variabili globali o nell'intestazione del POU.

Tutte le variabili di ingresso e uscita utilizzate per programmare questa funzione sono state dichiarate nell'intestazione del POU. La stessa intestazione del POU è utilizzata per tutti i linguaggi di programmazione.

VAR
PulseOutput_Home: PulseOutput_Home_FB;
bExecute: BOOL:=FALSE;
bReverse: BOOL:=FALSE;
bError: BOOL:=FALSE;
ChannelConfiguration_DUT: PulseOutput_Channel_Configuration_DUT;
bConfigureDUT: BOOL:=FALSE;
END_VAR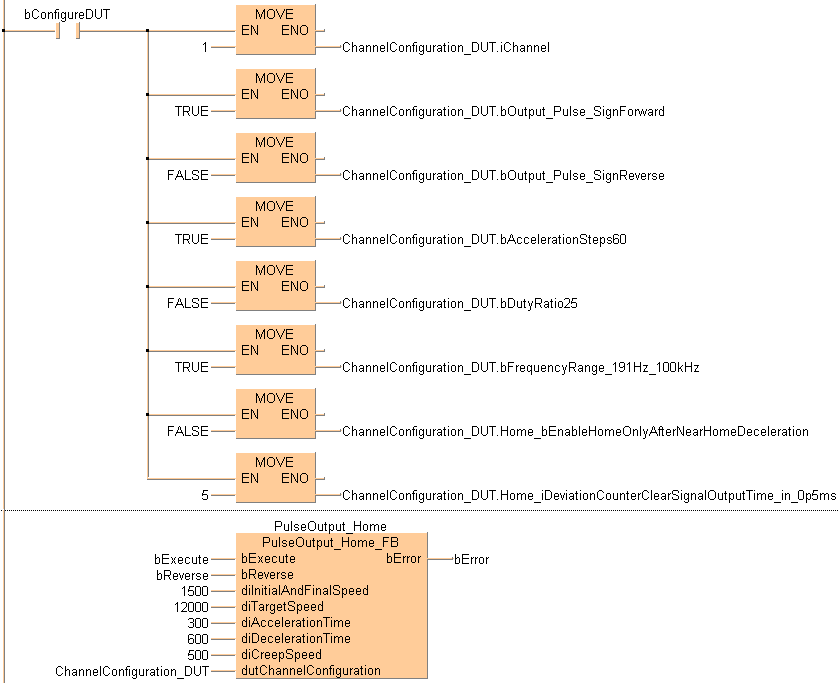
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 32 ;
NETWORK_BODY
B(B_CONTACT,,bConfigureDUT,4,1,6,3,);
B(B_F,E_MOVE!,,15,0,21,4,,?DEN?D?AENO?C);
B(B_VARIN,,1,13,2,15,4,);
B(B_F,E_MOVE!,,15,8,21,12,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,10,15,12,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignReverse,21,10,23,12,);
B(B_F,E_MOVE!,,15,12,21,16,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,15,4,21,8,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,13,6,15,8,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignForward,21,6,23,8,);
B(B_VARIN,,TRUE,13,14,15,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.iChannel,21,2,23,4,);
B(B_F,E_MOVE!,,15,16,21,20,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,18,15,20,);
B(B_VAROUT,,ChannelConfiguration_DUT.bDutyRatio25,21,18,23,20,);
B(B_F,E_MOVE!,,15,20,21,24,,?DEN?D?AENO?C);
B(B_VAROUT,,ChannelConfiguration_DUT.bAccelerationSteps60,21,14,23,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz,21,22,23,24,);
B(B_VARIN,,TRUE,13,22,15,24,);
B(B_F,E_MOVE!,,15,24,21,28,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,26,15,28,);
B(B_VAROUT,,ChannelConfiguration_DUT.Home_bEnableHomeOnlyAfterNearHomeDeceleration,21,26,23,28,);
B(B_F,E_MOVE!,,15,28,21,32,,?DEN?D?AENO?C);
B(B_VAROUT,,ChannelConfiguration_DUT.Home_iDeviationCounterClearSignalOutputTime_in_0p5ms,21,30,23,32,);
B(B_VARIN,,5,13,30,15,32,);
L(10,2,10,6);
L(10,10,10,14);
L(10,6,10,10);
L(10,14,10,18);
L(10,18,10,22);
L(10,22,10,26);
L(6,2,10,2);
L(1,2,4,2);
L(10,26,10,30);
L(10,30,15,30);
L(10,26,15,26);
L(10,22,15,22);
L(10,18,15,18);
L(10,6,15,6);
L(10,14,15,14);
L(10,10,15,10);
L(10,2,15,2);
L(1,0,1,32);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 11 ;
NETWORK_BODY
B(B_FB,PulseOutput_Home_FB!,PulseOutput_Home,15,1,28,11,,?BbExecute?BbReverse?BdiInitialAndFinalSpeed?BdiTargetSpeed?BdiAccelerationTime?BdiDecelerationTime?BdiCreepSpeed?BdutChannelConfiguration?AbError);
B(B_VARIN,,bExecute,13,2,15,4,);
B(B_VARIN,,bReverse,13,3,15,5,);
B(B_VARIN,,1500,13,4,15,6,);
B(B_VARIN,,12000,13,5,15,7,);
B(B_VARIN,,300,13,6,15,8,);
B(B_VARIN,,600,13,7,15,9,);
B(B_VARIN,,500,13,8,15,10,);
B(B_VARIN,,ChannelConfiguration_DUT,13,9,15,11,);
B(B_VAROUT,,bError,28,2,30,4,);
L(1,0,1,11);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Used DUT parameters *)
ChannelConfiguration_DUT.iChannel := 1;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardTrue := TRUE;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardFalse := FALSE;
ChannelConfiguration_DUT.bAccelerationSteps60 := FALSE;
ChannelConfiguration_DUT.bDutyRatio25 := TRUE;
ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz := TRUE;
ChannelConfiguration_DUT.Home_bEnableHomeOnlyAfterNearHomeDeceleration := FALSE;
ChannelConfiguration_DUT.Home_iDeviationCounterClearSignalOutputTime_in_0p5ms := 5;
ChannelConfiguration_DUT.bExecuteInInterrupt := FALSE;
(* FB *)
PulseOutput_Home(bExecute := bExecute,
bReverse := bReverse,
diInitialAndFinalSpeed := 1500,
diTargetSpeed := 12000,
diAccelerationTime := 300,
diDecelerationTime := 600,
diCreepSpeed := 500,
dutChannelConfiguration := ChannelConfiguration_DUT,
bError => bError);