


 FP_ATAN2
FP_ATAN2ラジアンへの座標データの変換
このFP命令は、-π~+πの範囲内にある直交座標(x、y)の値から、角度jを求めます。
入力
直行座標 y
直行座標 x
出力
結果(ラジアン)
2次元座標の各位置Pは、直交座標P(x,y)または極座標P(r,j)(r=半径、j=角度)によって決まります。

以下のようにFP_ATAN2を定義:
ATAN2_YX(y,x) |
x |
y |
|---|---|---|
 |
x > 0 |
|
 |
x < 0 |
y ³ 0 |
 |
y < 0 |
|
 |
x = 0 |
y > 0 |
 |
y < 0 |
|
演算エラー |
y = 0 |
s1_y(y座標)またはs2_x(x座標)に実数でない値を指定したとき
s1_y(y座標)に0.0を指定し、かつs2_x(x座標)に0.0を指定したとき

POUヘッダには、このプログラムで使用するすべての入力変数と出力変数を宣言します。 POUヘッダは全プログラム言語で使用できます。

VAR
bStart: BOOL:=FALSE;
(*activates the instruction*)
rPhi1Rad: REAL:=0.0;
rPhi1Degree: REAL:=0.0;
END_VAR
VAR CONSTANT
DEGR_OF_RAD: REAL:=57.295779513082320876798154814105;
END_VAR
VAR
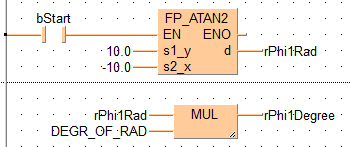
END_VAR変数bStartがTRUEにセットされると、このファンクションが実行されます。
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_F,FP_ATAN2!,,10,1,16,6,,?DEN?Ds1_y?Ds2_x?AENO?Cd);
B(B_VARIN,,10.0,8,3,10,5,);
B(B_VARIN,,-10.0,8,4,10,6,);
B(B_VAROUT,,rPhi1Rad,16,3,18,5,);
B(B_CONTACT,,bStart,3,2,5,4,);
L(1,3,3,3);
L(5,3,10,3);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,@MUL-2!,,11,1,16,4,,?D?D?C);
B(B_VARIN,,rPhi1Rad,9,1,11,3,);
B(B_VARIN,,DEGR_OF_RAD,9,2,11,4,);
B(B_VAROUT,,rPhi1Degree,16,1,18,3,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYrPhi1Rad:=ATAN2_YX(y := 10.0, x := -10.0); (* Result: 2.3561947 *)
rPhi1Degree := rPhi1Rad * DEGR_OF_RAD; (* Result: 135.00002 *)