F300_BSIN
F300_BSINBCD形実数 正弦
BCDコードの角度データ(入力s)の SIN を演算します。演算結果(出力d)は、3つの要素を持つ配列にBCD値として格納されます。
入力
角度データを格納する16ビットエリア
出力
結果を3ワードで格納
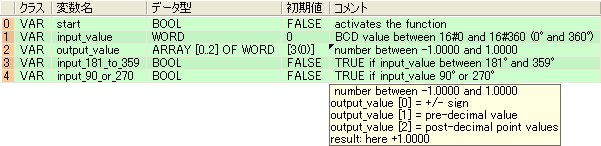
入力sのBCD値は、0~360度 (16#0~16#360) の範囲で、1度単位で指定します。出力dは、-1.0000~1.0000の範囲となります。演算結果は、以下のように出力されます。
符号(正のとき0、負のとき1)
整数部(0または1)
小数点以下の値を4桁のBCD値として入力 (16#0000~16#9999)
s の入力値がBCDデータでないときON
s の入力値が 0~360度の範囲でないときON
s の入力値がBCDデータでないときON
s の入力値が 0~360度の範囲でないときON
結果が“0”のときON
結果がオーバーフローしたときON

POUヘッダには、このプログラムで使用するすべての入力変数と出力変数を宣言します。 POUヘッダは全プログラム言語で使用できます。
VAR
start: BOOL:=FALSE;
(*activates the function*)
input_value: WORD:=16#30;
(*corresponds to 30°*)
output_value: ARRAY [0..2] OF WORD:=[3(0)];
(*result after a 0->1 leading
edge from start:
[0,0,5000]*)
input_181_to_359: BOOL:=FALSE;
input_90_or_270: BOOL:=FALSE;
END_VARこの例では、入力変数input_valueが宣言されています。ファンクションの入力ピンに、定数を直接記述することもできます。(例: 45度の場合: 16#45)
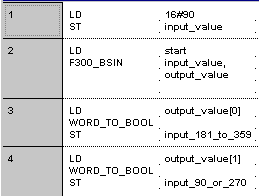
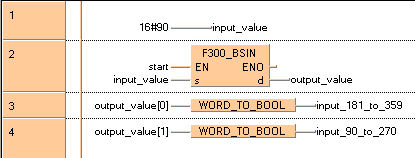
この例では、値90°が変数input_valueに入力されています。変数startがTRUEにセットされると、F300_BSINファンクションが実行されます。演算結果は、変数output_valueに格納されます。入力input_valueが、181~359度の範囲のとき、出力output_valueに負の符号が付きます。WORD_TO_BOOLファンクションの出力input_181_to_359はTRUEとなります。入力input_valueが、90度または270度のとき、出力output_valueの値が"1"となります。このとき、WORD_TO_BOOLファンクションの出力input_90_or_270はTRUEとなります。
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_VARIN,,16#90,8,0,10,2,);
B(B_VAROUT,,input_value,10,0,12,2,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_F,F300_BSIN,,10,0,19,4,,?DEN?D@'s'?AENO?Cd);
B(B_VARIN,,input_value,8,2,10,4,);
B(B_VAROUT,,output_value,19,2,21,4,);
B(B_VARIN,,output,8,1,10,3,);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_VARIN,,output_value[0],8,1,10,3,);
B(B_F,WORD_TO_BOOL,,10,0,21,3,,?Da_Word?C);
B(B_VAROUT,,input_181_to_359,21,1,23,3,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_VARIN,,output_value[1],8,1,10,3,);
B(B_F,WORD_TO_BOOL,,10,0,21,3,,?Da_Word?C);
B(B_VAROUT,,input_90_or_270,21,1,23,3,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
END_BODYinput_value:=16#90;
IF start THEN
F300_BSIN( input_value, output_value );
END_IF;
input_181_to_359:=WORD_TO_BOOL(output_value[0]);
input_90_or_270:=WORD_TO_BOOL(output_value[1]);