


 FP_ETHERNETIP_START
FP_ETHERNETIP_STARTサイクリック通信の開始要求
このFP命令は、開始要求が行われたノードを開始し、結果を出力変数d_Resultに書き込みます。ノード番号テーブルは、FP_ETHERNETIP_STATE_TABLE_DUTで指定します。
入力
開始要求のノード番号テーブル
最大ノード番号(1~256)または定数を格納するメモリエリアアドレス。
出力
データを書き込む宛先
0:指定したノードの開始が完了した
1:指定したノードの開始処理が進行中
2:指定したノードの開始に失敗した
3:FP_ETHERNETIP_STARTの複数の開始
読み出しエリアが許容範囲外の場合
命令が割り込みプログラム内で実行された場合
読み出しエリアが許容範囲外の場合
命令が割り込みプログラム内で実行された場合

POUヘッダには、このプログラムで使用するすべての入力変数と出力変数を宣言します。 POUヘッダは全プログラム言語で使用できます。

VAR
bEnable: BOOL:=FALSE;
wResult: WORD:=0;
dutNodes_NodeTableStart: FP_ETHERNETIP_STATE_TABLE_DUT;
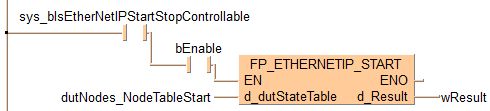
END_VAR変数sys_bIsEtherNetIPStartStopControllableとbEnableがTRUEにセットされたとき、ファンクションが実行されます。
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 8 ;
NETWORK_BODY
B(B_VARIN,,dutNodes_NodeTableStart,13,5,15,7,);
B(B_VAROUT,,wResult,27,5,29,7,);
B(B_CONTACT,,bEnable,12,3,14,5,);
B(B_CONTACT,,sys_bIsEtherNetIPStartStopControllable,8,1,10,3,);
B(B_F,FP_ETHERNETIP_START!,,15,3,27,7,,?DEN?Dd_dutStateTable?AENO?Cd_Result);
L(1,2,8,2);
L(14,4,14,5);
L(14,5,15,5);
L(10,2,10,4);
L(10,4,12,4);
L(1,0,1,8);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF (sys_bIsEtherNetIPStartStopControllable) AND (bEnable) then
FP_ETHERNETIP_START(d_dutStateTable := dutNodes_NodeTableStart,
d_Result => wResult);
End_if;
END_IF;