


 Unit_AnalogOutput_FP0R_DA4
Unit_AnalogOutput_FP0R_DA4FP0R-DA4 유닛에 쓰는 펑션블록입니다.
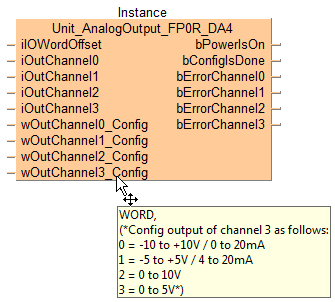
이 펑션블록은 아날로그 유닛의 아날로그 출력 채널에 디지털 데이터를 씁니다. 변환될 디지털 값과 아날로그 값인 출력은 iOutChannel0~iOutChannel3에 지정되어 있습니다.
아날로그 출력 범위도 이 펑션블록으로 설정됩니다.
전압 또는 전류 출력은 DIP 스위치로 설정해야 합니다.
입력
설치 위치에 따라 아날로그 유닛의 최초 WX/WY 어드레스 오프셋을 설정합니다.
CPU에 직접 연결된 아날로그 증설 유닛의 경우(어댑터 없음): ExpansionUnitToIOWordOffset_FP0를 사용하거나 다음 설정 지정: 유닛 번호 1에 대한 2(WX2/WY2), 유닛 번호 2에 대한 4(WX4/WY4), 유닛 번호 3에 대한 6(WX6/WY6)
어댑터를 통해 CPU에 연결된 아날로그 증설 유닛의 경우: ExpansionUnitToIOWordOffset_FPX_FP0을 사용하거나 테이블에서 오프셋을 선택합니다.
어댑터에 상대적인 유닛 위치 |
CPU에 상대적인 어댑터 위치 |
|||||||
|---|---|---|---|---|---|---|---|---|
1번째 유닛 |
2번째 유닛 |
3번째 유닛 |
4번째 유닛 |
5번째 유닛 |
6번째 유닛 |
7번째 유닛 |
8번째 유닛 |
|
1번째 유닛 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
2번째 유닛 |
32 |
42 |
52 |
62 |
72 |
82 |
92 |
102 |
3번째 유닛 |
34 |
44 |
54 |
64 |
74 |
84 |
94 |
104 |
아날로그 유닛으로 변환될 디지털 값과 출력을 설정합니다.
아날로그 출력 채널의 전압 또는 전류 범위를 설정합니다.
출력
유닛 상태: 전원이 켜져 있으면 TRUE입니다.
I/O 구성이 완료되고 유닛이 준비된 경우 TRUE입니다.
채널 상태: 에러가 있는 경우 TRUE입니다.
14비트 모드를 사용하려면 스위치 1이 켜져 있어야 합니다. 스위치 2~5는 각 채널의 전압 또는 전류 출력을 선택하는 데 사용됩니다.
DIP 스위치 설정은 전원이 OFF에서 ON으로 전환될 때 적용됩니다.
채널 0 |
채널 1 |
채널 2 |
채널 3 |
|||||
|---|---|---|---|---|---|---|---|---|
전압 출력 |
전류 출력 |
전압 출력 |
전류 출력 |
전압 출력 |
전류 출력 |
전압 출력 |
전류 출력 |
|
 |
 |
 |
 |
 |
 |
 |
 |
 |
전압 출력 |
전류 출력 |
|---|---|
 |
 |
-10V~+10V DC 출력 |
-5V~+5V DC 출력 |
0V~5V DC 출력 |
|||
|---|---|---|---|---|---|
디지털 값(INT) |
아날로그 값 |
디지털 값(INT) |
아날로그 값 |
디지털 값(INT) |
아날로그 값 |
-8000 |
-10,0V |
-8000 |
-5,0V |
0 |
0,0V |
-4000 |
-5,0V |
-4000 |
-2,5V |
4000 |
1,25V |
0 |
0V |
0 |
0V |
8000 |
2,5V |
+4000 |
5,0V |
+4000 |
+2,5V |
12000 |
3,75V |
+8000 |
10,0V |
+8000 |
+5,0V |
16000 |
5,0V |
0V~10V DC 출력 |
0mA~20mA 출력 |
4mA~20mA 출력 |
|||
|---|---|---|---|---|---|
디지털 값(INT) |
아날로그 값 |
디지털 값(INT) |
아날로그 값 |
디지털 값(INT) |
아날로그 값 |
0 |
0,0V |
0 |
0,0mA |
0 |
4,0mA |
4000 |
2,5V |
3200 |
4,0mA |
4000 |
8,0mA |
8000 |
5,0V |
6400 |
8,0mA |
8000 |
12,0mA |
12000 |
7,5V |
9600 |
12,0mA |
12000 |
16,0mA |
16000 |
10,0V |
12800 |
16,0mA |
16000 |
20,0mA |
16000 |
20,0mA |
||||
이 명령 설명은 기본 하드웨어 설명서만 제공합니다. 자세한 기술 정보는 매뉴얼을 참조하십시오.

이 펑션 프로그램 시 사용한 모든 입력과 출력 변수는 POU 헤더에서 선언되었습니다. 모든 프로그래밍 언어에 같은 POU 헤더를 사용합니다.
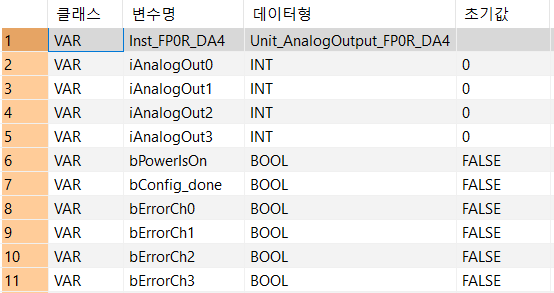
VAR
Inst_FP0R_DA4: Unit_AnalogOutput_FP0R_DA4;
iAnalogOut0: INT:=0;
iAnalogOut1: INT:=0;
iAnalogOut2: INT:=0;
iAnalogOut3: INT:=0;
bPowerIsOn: BOOL:=FALSE;
bConfig_done: BOOL:=FALSE;
bErrorCh0: BOOL:=FALSE;
bErrorCh1: BOOL:=FALSE;
bErrorCh2: BOOL:=FALSE;
bErrorCh3: BOOL:=FALSE;
END_VAR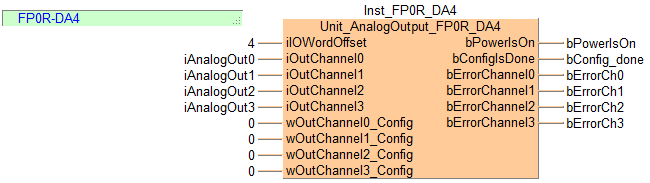
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 12 ;
NETWORK_BODY
B(B_COMMENT,,FP0R-DA4,2,1,17,2,);
B(B_FB,Unit_AnalogOutput_FP0R_DA4!,Inst_FP0R_DA4,19,1,36,12,,?BiIOWordOffset?BiOutChannel0?BiOutChannel1?BiOutChannel2?BiOutChannel3?BwOutChannel0_Config?BwOutChannel1_Config?BwOutChannel2_Config?BwOutChannel3_Config?CbPowerIsOn?CbConfigIsDone?CbErrorChannel0?CbErrorChannel1?CbErrorChannel2?CbErrorChannel3);
B(B_VARIN,,4,17,2,19,4,);
B(B_VAROUT,,bPowerIsOn,36,2,38,4,);
B(B_VARIN,,iAnalogOut0,17,3,19,5,);
B(B_VAROUT,,bConfig_done,36,3,38,5,);
B(B_VARIN,,iAnalogOut1,17,4,19,6,);
B(B_VAROUT,,bErrorCh0,36,4,38,6,);
B(B_VARIN,,iAnalogOut2,17,5,19,7,);
B(B_VAROUT,,bErrorCh1,36,5,38,7,);
B(B_VARIN,,iAnalogOut3,17,6,19,8,);
B(B_VAROUT,,bErrorCh2,36,6,38,8,);
B(B_VARIN,,0,17,7,19,9,);
B(B_VAROUT,,bErrorCh3,36,7,38,9,);
B(B_VARIN,,0,17,8,19,10,);
B(B_VARIN,,0,17,9,19,11,);
B(B_VARIN,,0,17,10,19,12,);
L(1,0,1,12);
END_NETWORK_BODY
END_NET_WORK
END_BODYInst_FP0R_DA4(iIOWordOffset := 2,
iOutChannel0 := iAnalogOut0,
iOutChannel1 := iAnalogOut1,
iOutChannel2 := iAnalogOut2,
iOutChannel3 := iAnalogOut3,
wOutChannel0_Config := 0,
wOutChannel1_Config := 0,
wOutChannel2_Config := 0,
wOutChannel3_Config := 0,
bPowerIsOn => bPowerIsOn,
bConfigIsDone => bConfig_done,
bErrorChannel0 => bErrorCh0,
bErrorChannel1 => bErrorCh1,
bErrorChannel2 => bErrorCh2,
bErrorChannel3 => bErrorCh3);