


 FP_ATAN2
FP_ATAN2
좌표 데이터를 라디안으로 변환
이 FP 명령은 -π ~ +π 범위 내에서 데카르트 좌표(x,y)의 각도 j를 반환합니다.
입력
데카르트 y 좌표
데카르트 x 좌표
출력
결과(라디안)
2차원 좌표의 각 위치 P는 데카르트 좌표 P(x,y) 또는 극좌표 P(r, j )(r = 반경, j = 각도)로 정의할 수 있습니다.

FP_ATAN2는 다음과 같이 정의합니다.
|
ATAN2_YX(y,x) |
x |
y |
|---|---|---|

|
x > 0 |
|

|
x < 0 |
y ³ 0 |

|
y < 0 |
|

|
x = 0 |
y > 0 |

|
y < 0 |
|
|
연산 에러 |
y = 0 |
s1_y(y 좌표) 또는 s2_x(x 좌표)에 실수가 아닌 수가 지정되는 경우
s1_y(y 좌표)에 0,0이 지정되고 s2_x(x 좌표)에 0,0이 지정되는 경우

이 펑션 프로그램 시 사용한 모든 입력과 출력 변수는 POU 헤더에서 선언되었습니다. 모든 프로그래밍 언어에 같은 POU 헤더를 사용합니다.

VAR
bStart: BOOL:=FALSE;
(*activates the instruction*)
rPhi1Rad: REAL:=0.0;
rPhi1Degree: REAL:=0.0;
END_VAR
VAR CONSTANT
DEGR_OF_RAD: REAL:=57.295779513082320876798154814105;
END_VAR
VAR
END_VAR변수 bStart가 TRUE로 설정되면 펑션이 실행됩니다.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
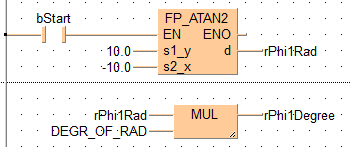
B(B_F,FP_ATAN2!,,10,1,16,6,,?DEN?Ds1_y?Ds2_x?AENO?Cd);
B(B_VARIN,,10.0,8,3,10,5,);
B(B_VARIN,,-10.0,8,4,10,6,);
B(B_VAROUT,,rPhi1Rad,16,3,18,5,);
B(B_CONTACT,,bStart,3,2,5,4,);
L(1,3,3,3);
L(5,3,10,3);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,@MUL-2!,,11,1,16,4,,?D?D?C);
B(B_VARIN,,rPhi1Rad,9,1,11,3,);
B(B_VARIN,,DEGR_OF_RAD,9,2,11,4,);
B(B_VAROUT,,rPhi1Degree,16,1,18,3,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYrPhi1Rad:=ATAN2_YX(y := 10.0, x := -10.0); (* Result: 2.3561947 *)
rPhi1Degree := rPhi1Rad * DEGR_OF_RAD; (* Result: 135.00002 *)