


 F119_LRSR
F119_LRSR왼쪽/오른쪽 시프트 등록
16비트 데이터 범위의 1 bit를 왼쪽 또는 오른쪽으로 시프트합니다.
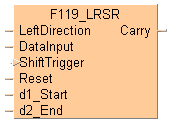
입력
왼쪽/오른쪽 트리거가 시프트아웃 방향을 지정합니다.
새 시프트인 데이터를 지정합니다.
새 시프트인 데이터 = TRUE = 1(데이터 입력이 TRUE 상태인 경우).
시프트를 활성화합니다.
트리거의 상승 엣지가 검색되면 왼쪽 또는 오른쪽으로 1비트 시프트합니다(FALSE®TRUE).
트리거가 TRUE 상태이면 d1_Start와 d2_End에서 지정한 데이터 범위의 모든 비트를 0으로 전환합니다.
d1_Start와 d2_End에서 지정한 영역의 데이터를 0으로 리셋합니다.
16비트 영역 끝
16비트 영역 시작
출력
시프트아웃된 비트

변수 d1_Start와 d2_End의 데이터 형식은 같아야 합니다.
이 펑션은 출력 Carry에 변수가 필요하지 않습니다.
왼쪽/오른쪽 시프트는 지정된 데이터 영역의 1 bit를 왼쪽(상위 비트 위치) 또는 오른쪽(하위 비트 위치)으로 시프트하는 시프트 등록입니다.

이 펑션 프로그램 시 사용한 모든 입력과 출력 변수는 POU 헤더에서 선언되었습니다. 모든 프로그래밍 언어에 같은 POU 헤더를 사용합니다.
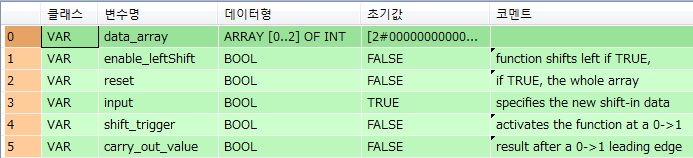
VAR
data_array: ARRAY [0..2] OF INT:=[2#0000000000000001,2#0011111111111111,2#0011111111111110];
enable_leftShift: BOOL:=FALSE;
(*function shifts left if TRUE,
else it shifts right*)
reset: BOOL:=FALSE;
(*if TRUE, the whole array
will be set to zero*)
input: BOOL:=TRUE;
(*specifies the new shift-in data*)
shift_trigger: BOOL:=FALSE;
(*activates the function at a 0->1
leading edge*)
carry_out_value: BOOL:=FALSE;
(*result after a 0->1 leading edge
from shift_trigger: 1.
After the next cycle the value will be
set back to zero.*)
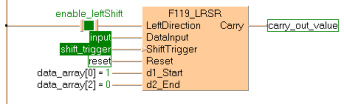
END_VAR변수 enable_leftShift가 TRUE로 설정되면 펑션이 왼쪽으로 시프트하고 그렇지 않으면 오른쪽으로 시프트합니다.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 9 ;
NETWORK_BODY
B(B_F,F119_LRSR!,Instanz,12,1,22,9,,?DLeftDirection?DDataInput?DShiftTrigger?DReset?Dd1_Start?Dd2_End?ACarry);
B(B_CONTACT,,enable_leftShift,7,2,9,4,);
B(B_VARIN,,input,9,3,11,5,);
B(B_VARIN,,shift_trigger,9,4,11,6,);
B(B_VARIN,,reset,9,5,11,7,);
B(B_VARIN,,data_array[0],9,6,11,8,);
B(B_VARIN,,data_array[2],9,7,11,9,);
B(B_VAROUT,,carry_out_value,22,2,24,4,);
L(1,3,7,3);
L(9,3,12,3);
L(11,4,12,4);
L(11,5,12,5);
L(11,6,12,6);
L(11,7,12,7);
L(11,8,12,8);
L(1,0,1,9);
END_NETWORK_BODY
END_NET_WORK
END_BODYcarry_out_value:=F119_LRSR( LeftDirection:= enable_leftShift,
DataInput:= input,
ShiftTrigger:= shift_trigger,
Reset:= reset,
d1_Start:= data_array[0],
d1_End:= data_array[2]);