


 FP_LIFO_READ
FP_LIFO_READLIFO 버퍼에서 읽기
이 FP 명령은 s_Start에서 지정한 LIFO(후입선출) 버퍼의 시작 데이터 영역에서 데이터를 읽고 d에서 지정한 영역에 데이터를 저장합니다.
입력
버퍼의 시작 데이터 영역
출력
LIFO 버퍼에서 읽은 데이터를 저장하는 데이터 영역
변수 s_Start 및 d의 데이터 형식은 같아야 합니다.
저장된 데이터 수가 0일 때 이 명령을 실행하면 오류가 발생합니다.
읽기 포인터가 쓰기 포인터와 같을 때 이 명령이 실행되면 오류가 발생하고 읽기가 수행되지 않습니다.
읽기 포인터가 LIFO 버퍼의 최종 어드레스를 나타내는 경우에 이 명령을 실행하면(n_Words는 FP_LIFO_DEFINE -1로 정의됨), 읽기 포인터가 0으로 설정됩니다.
d_Start에서 지정한 버퍼의 크기(n_Words)가 n_Words = 0이거나 n_Words > 4096인 경우.
버퍼의 저장된 데이터 항목 수가 0인 경우.
버퍼의 저장된 데이터 항목 수가 버퍼 크기(n_Words)보다 큰 경우.
읽기 포인터가 버퍼 크기(n_Words)보다 큰 경우.
데이터를 읽은 후에 읽기 포인터가 4096(16#1000) 이상인 경우.
d_Start에서 지정한 버퍼의 크기(n_Words)가 n_Words = 0이거나 n_Words > 4096인 경우.
버퍼의 저장된 데이터 항목 수가 0인 경우.
버퍼의 저장된 데이터 항목 수가 버퍼 크기(n_Words)보다 큰 경우.
읽기 포인터가 버퍼 크기(n_Words)보다 큰 경우.
데이터를 읽은 후에 읽기 포인터가 4096(16#1000) 이상인 경우.
해당 F 명령: F116_FIFR

이 펑션 프로그램 시 사용한 모든 입력과 출력 변수는 POU 헤더에서 선언되었습니다.모든 프로그래밍 언어에 같은 POU 헤더를 사용합니다.
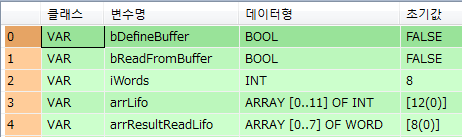
VAR
bDefineBuffer: BOOL:=FALSE;
bReadFromBuffer: BOOL:=FALSE;
iWords: INT:=8;
arrLifo: ARRAY [0..11] OF INT:=[12(0)];
arrResultReadLifo: ARRAY [0..7] OF WORD:=[8(0)];
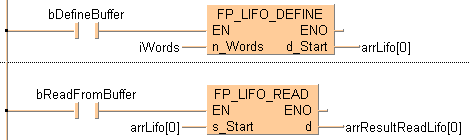
END_VAR변수 bDefineBuffer가 TRUE로 설정되면 함수가 실행됩니다.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,FP_FIFO_DEFINE!,,13,1,22,5,,?DEN?Dn_Words?AENO?Cd_Start);
B(B_VARIN,,iWords,11,3,13,5,);
B(B_VAROUT,,arrLifo[0],22,3,24,5,);
B(B_CONTACT,,bDefineBuffer,5,2,7,4,);
L(7,3,13,3);
L(1,3,5,3);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,FP_FIFO_READ!,,13,1,21,5,,?DEN?Ds_Start?AENO?Cd);
B(B_VARIN,,arrLifo[0],11,3,13,5,);
B(B_VAROUT,,arrResultReadLifo[0],21,3,23,5,);
B(B_CONTACT,,bReadFromBuffer,5,2,7,4,);
L(7,3,13,3);
L(1,3,5,3);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYif (bReadFromBuffer) then
FP_LIFO_READ(s_Start := arrLifo[0],
d => arrResultReadLifo[0]);
end_if;