


 FP_POS_UNIT_GET_ERROR
FP_POS_UNIT_GET_ERROR유닛결정 유닛의 오류 또는 경고 가져오기
이 FP 명령은 트리거 EN이 TRUE일 경우, 위치결정 유닛의 버퍼 1에서 s1_Slot에서 지정한 슬롯과 s2_Axis에서 지정한 축의 오류 및 경고 코드를 읽습니다. 에러 코드는 d1_Error에 저장되고 경고 코드는 d2_Warning에 저장됩니다.
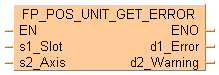
입력
슬롯 번호
축 번호
값: 1–4, 8(가상 축)
출력
에러 코드
경고 코드
인덱스 한정자를 사용하여 지정한 영역이 제한을 초과하는 경우.
슬롯 및/또는 축 번호가 범위를 벗어난 경우
d1_Error 또는 d2_Warning이 범위를 벗어난 경우
인덱스 한정자를 사용하여 지정한 영역이 제한을 초과하는 경우.
슬롯 및/또는 축 번호가 범위를 벗어난 경우
d1_Error 또는 d2_Warning이 범위를 벗어난 경우
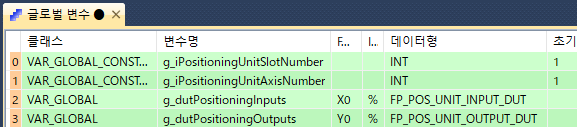
글로벌 변수 리스트에서 프로젝트의 모든 POU에서 액세스할 수 있는 변수를 정의합니다.

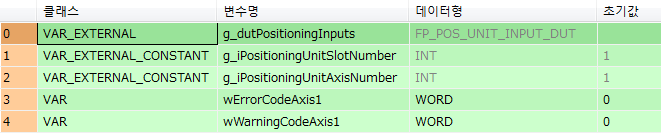
이 펑션 프로그램 시 사용한 모든 입력과 출력 변수는 POU 헤더에서 선언되었습니다. 모든 프로그래밍 언어에 같은 POU 헤더를 사용합니다.
IF g_dutPositioningInputs.b60_ErrorAxis1 OR g_dutPositioningInputs.b68_WarningAxis1 then
FP_POS_UNIT_GET_ERROR(s1_Slot := g_iPositioningUnitSlotNumber,
s2_Axis := g_iPositioningUnitAxisNumber,
d1_Error => wErrorCodeAxis1,
d2_Warning => wWarningCodeAxis1);
END_IF;