


 FP_POS_UNIT_SET_TABLE
FP_POS_UNIT_SET_TABLE위치결정 테이블 설정
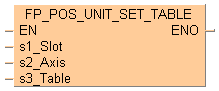
이 FP 명령은 트리거 EN이 TRUE일 경우, s3_Table에서 지정한 위치결정 테이블에 따라 s1_Slot에서 지정한 슬롯과 s2_Axis에서 지정한 축에 대해 위치결정 유닛에서 위치 결정을 시작합니다. Configurator PM7에서 위치결정 테이블을 구성합니다.
입력
슬롯 번호
축 번호
값: 1–4, 8(가상 축)
위치결정 테이블 수
값: 1–600, 10001–10025
인덱스 한정자를 사용하여 지정한 영역이 제한을 초과하는 경우.
슬롯 및/또는 축 번호가 범위를 벗어난 경우
인덱스 한정자를 사용하여 지정한 영역이 제한을 초과하는 경우.
슬롯 및/또는 축 번호가 범위를 벗어난 경우
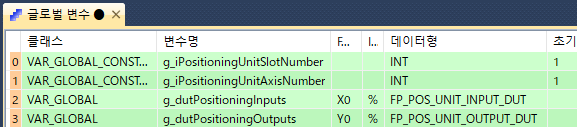
글로벌 변수 리스트에서 프로젝트의 모든 POU에서 액세스할 수 있는 변수를 정의합니다.
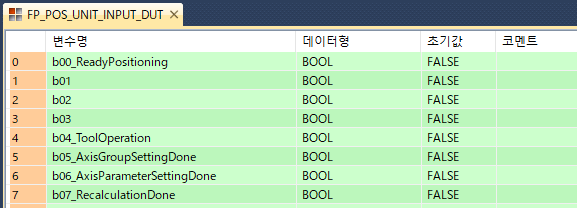
입력
출력
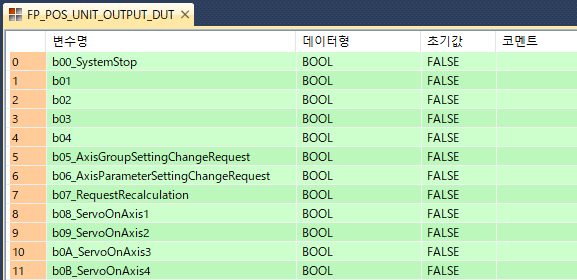
프로그램에서 이 DUT를 사용하도록 DUT를 클립보드에 복사하고 네비게이터의 DUT 풀에 직접 DUT를 붙여 넣습니다.
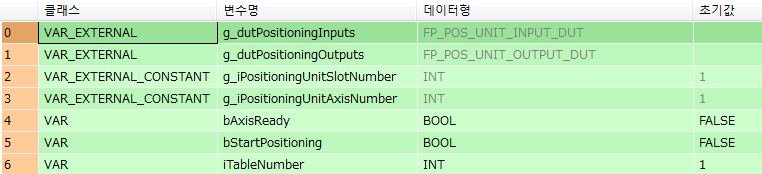
이 펑션 프로그램 시 사용한 모든 입력과 출력 변수는 POU 헤더에서 선언되었습니다. 모든 프로그래밍 언어에 같은 POU 헤더를 사용합니다.
변수 bStart가 FALSE에서 TRUE로 변경되면 함수가 실행됩니다.
VAR_EXTERNAL
g_dutPositioningInputs: FP_POS_UNIT_INPUT_DUT;
g_dutPositioningOutputs: FP_POS_UNIT_OUTPUT_DUT;
END_VAR
VAR_EXTERNAL CONSTANT
g_iPositioningUnitSlotNumber: INT:=1;
g_iPositioningUnitAxisNumber: INT:=1;
END_VAR
VAR
bAxisReady: BOOL:=FALSE;
bStartPositioning: BOOL:=FALSE;
iTableNumber: INT:=1;
@'': @'';
END_VAR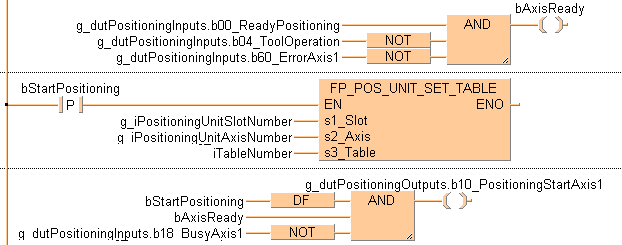
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,g_dutPositioningInputs.b00_ReadyPositioning,21,1,23,3,);
B(B_VARIN,,g_dutPositioningInputs.b04_ToolOperation,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b60_ErrorAxis1,21,3,23,5,);
B(B_F,NOT!,,23,2,28,4,,?D?C);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,bAxisReady,43,1,45,3,);
L(23,2,28,2);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,bStartPositioning,5,1,7,3,R);
B(B_F,FP_POS_UNIT_SET_TABLE!,,25,0,38,6,,?DEN?Ds1_Slot?Ds2_Axis?Ds3_Table?AENO);
B(B_VARIN,,g_iPositioningUnitSlotNumber,23,2,25,4,);
B(B_VARIN,,g_iPositioningUnitAxisNumber,23,3,25,5,);
B(B_VARIN,,iTableNumber,23,4,25,6,);
L(1,2,5,2);
L(7,2,25,2);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,bStartPositioning,21,1,23,3,);
B(B_VARIN,,bAxisReady,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b18_BusyAxis1,21,3,23,5,);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,g_dutPositioningOutputs.b10_PositioningStartAxis1,43,1,45,3,);
B(B_F,DF!,,23,0,28,3,,?Di?Co);
L(23,3,28,3);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYIf (g_dutPositioningInputs.b00_ReadyPositioning AND NOT g_dutPositioningInputs.b04_ToolOperation
AND NOT g_dutPositioningInputs.b60_ErrorAxis1) then
bAxisReady:=TRUE;
End_if;
If (bStart) then
FP_POS_UNIT_SET_TABLE(s1_Slot := g_iPositioningUnitSlotNumber,
s2_Axis := g_iPositioningUnitAxisNumber,
s3_Table := iTableNumber);
End_if;
If DF((bStart) AND bAxisReady Then AND NOT g_dutPositioningInputs.b18_BusyAxis1) then
g_dutPositioningOutputs.b10_PositioningStartAxis1:=TRUE;
End_if;