


 FP_ATAN2
FP_ATAN2将坐标数据转换为弧度
此FP指令在-π到+π的范围内返回笛卡尔坐标 (x,y) 的角度j。
输入
笛卡尔y坐标
笛卡尔x坐标
输出
以弧度表示的结果
二维坐标的各个位置P可以由笛卡尔坐标P(x,y)或极坐标P(r,j)(r =半径,j =角度)定义。

如下定义FP_ATAN2:
ATAN2_YX(y,x) |
x |
y |
|---|---|---|
 |
x > 0 |
|
 |
x < 0 |
y ³ 0 |
 |
y < 0 |
|
 |
x = 0 |
y > 0 |
 |
y < 0 |
|
运算错误 |
y = 0 |
如果对s1_y(y坐标)或s2_x(x坐标)指定了非实数
如果对s1_y(y坐标)指定0,0并对s2_x(x坐标)指定0,0

所有用于编程此函数的输入和输出变量已在POU头中声明。 所有编程语言使用相同的POU头。

VAR
bStart: BOOL:=FALSE;
(*activates the instruction*)
rPhi1Rad: REAL:=0.0;
rPhi1Degree: REAL:=0.0;
END_VAR
VAR CONSTANT
DEGR_OF_RAD: REAL:=57.295779513082320876798154814105;
END_VAR
VAR
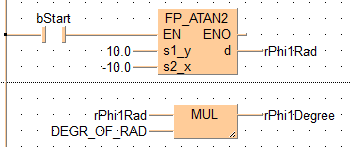
END_VAR当变量bStart设置为TRUE时,执行此函数。
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_F,FP_ATAN2!,,10,1,16,6,,?DEN?Ds1_y?Ds2_x?AENO?Cd);
B(B_VARIN,,10.0,8,3,10,5,);
B(B_VARIN,,-10.0,8,4,10,6,);
B(B_VAROUT,,rPhi1Rad,16,3,18,5,);
B(B_CONTACT,,bStart,3,2,5,4,);
L(1,3,3,3);
L(5,3,10,3);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,@MUL-2!,,11,1,16,4,,?D?D?C);
B(B_VARIN,,rPhi1Rad,9,1,11,3,);
B(B_VARIN,,DEGR_OF_RAD,9,2,11,4,);
B(B_VAROUT,,rPhi1Degree,16,1,18,3,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYrPhi1Rad:=ATAN2_YX(y := 10.0, x := -10.0); (* Result: 2.3561947 *)
rPhi1Degree := rPhi1Rad * DEGR_OF_RAD; (* Result: 135.00002 *)