


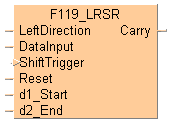
 F119_LRSR
F119_LRSR左/右移位寄存器
将16位数据范围的1位向左或向右迁移。
输入
左/右触发器;指定移出的方向:
指定新移入数据。
新移入数据= TRUE = 1:当数据输入处于TRUE状态时。
激活迁移
当检测到触发器的上升沿时,向左或向右迁移1位(FALSE®TRUE)。
如果触发器处于TRUE状态,将d1_Start和d2_End指定的数据范围的所有位变为0。
将d1_Start和d2_End指定区域内的数据复位至0
结束16位区域
起始16位区域
输出
移出的位

变量d1_Start和d2_End必须为相同的数据类型。
此函数不需要输出Carry处的变量。
左/右移位是移位寄存器,可将指定数据区域的1位向左迁移(至较高位位置)或向右迁移(至较低位位置)。

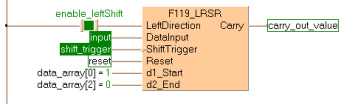
所有用于编程此函数的输入和输出变量已在POU头中声明。 所有编程语言使用相同的POU头。

VAR
data_array: ARRAY [0..2] OF INT:=[2#0000000000000001,2#0011111111111111,2#0011111111111110];
enable_leftShift: BOOL:=FALSE;
(*function shifts left if TRUE,
else it shifts right*)
reset: BOOL:=FALSE;
(*if TRUE, the whole array
will be set to zero*)
input: BOOL:=TRUE;
(*specifies the new shift-in data*)
shift_trigger: BOOL:=FALSE;
(*activates the function at a 0->1
leading edge*)
carry_out_value: BOOL:=FALSE;
(*result after a 0->1 leading edge
from shift_trigger: 1.
After the next cycle the value will be
set back to zero.*)
END_VAR当变量enable_leftShift设置为TRUE时,此函数向左迁移,否则向右迁移。
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 9 ;
NETWORK_BODY
B(B_F,F119_LRSR!,Instanz,12,1,22,9,,?DLeftDirection?DDataInput?DShiftTrigger?DReset?Dd1_Start?Dd2_End?ACarry);
B(B_CONTACT,,enable_leftShift,7,2,9,4,);
B(B_VARIN,,input,9,3,11,5,);
B(B_VARIN,,shift_trigger,9,4,11,6,);
B(B_VARIN,,reset,9,5,11,7,);
B(B_VARIN,,data_array[0],9,6,11,8,);
B(B_VARIN,,data_array[2],9,7,11,9,);
B(B_VAROUT,,carry_out_value,22,2,24,4,);
L(1,3,7,3);
L(9,3,12,3);
L(11,4,12,4);
L(11,5,12,5);
L(11,6,12,6);
L(11,7,12,7);
L(11,8,12,8);
L(1,0,1,9);
END_NETWORK_BODY
END_NET_WORK
END_BODYcarry_out_value:=F119_LRSR( LeftDirection:= enable_leftShift,
DataInput:= input,
ShiftTrigger:= shift_trigger,
Reset:= reset,
d1_Start:= data_array[0],
d1_End:= data_array[2]);