


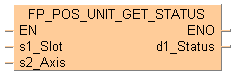
 FP_POS_UNIT_GET_STATUS
FP_POS_UNIT_GET_STATUS获得位置控制单元的轴状态
如果触发器EN为TRUE,该FP指令将从s1_Slot指定插槽和s2_Axis指定轴中的位置控制单元读取状态数据。结果存储在d1_Status中。
输入
插槽编号
轴编号
值:1–4, 8(虚拟轴)
输出
状态信息
轴状态信息的类型
位 |
状态信息 |
TRUE |
|---|---|---|
0 |
工具动作执行中 |
在工具执行使用Configurator PM配置的任意轴的操作期间 |
1 |
错误 |
如果指定轴上发生错误 |
2 |
警告 |
如果对指定轴发出警告 |
3 |
正忙 |
如果指定轴正在运行 |
4 |
动作结束 |
如果指定轴上的操作完成 |
5 |
原点返回结束 |
如果指定轴上的原点返回完成 |
如果使用索引寄存器指定的区域超出限制。
如果插槽和/或轴编号超出范围
如果使用索引寄存器指定的区域超出限制。
如果插槽和/或轴编号超出范围

所有用于编程此函数的输入和输出变量已在POU头中声明。 所有编程语言使用相同的POU头。
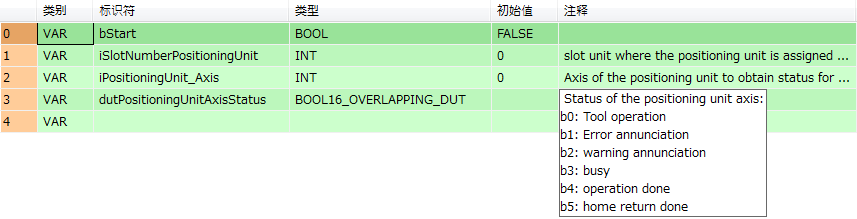
VAR
bStart: BOOL:=FALSE;
iSlotNumberPositioningUnit: INT:=0;
(*slot unit where the positioning unit is assigned 1- 64*)
iPositioningUnit_Axis: INT:=0;
(*Axis of the positioning unit to obtain status for (1-4: axis; 8: virtual axis)*)
dutPositioningUnitAxisStatus: BOOL16_OVERLAPPING_DUT;
(*Status of the positioning unit axis:
b0: Tool operation
b1: Error annunciation
b2: warning annunciation
b3: busy
b4: operation done
b5: home return done*)
END_VAR当变量bStart设置为TRUE时,执行此函数。

BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_F,FP_POS_UNIT_GET_STATUS!,,17,1,31,6,,?DEN?Ds1_Slot?Ds2_Axis?AENO?Cd1_Status);
B(B_VARIN,,iSlotNumberPositioningUnit,15,3,17,5,);
B(B_VARIN,,iPositioningUnit_Axis,15,4,17,6,);
B(B_VAROUT,,dutPositioningUnitAxisStatus.w0,31,3,33,5,);
B(B_CONTACT,,bStart,3,2,5,4,);
L(5,3,17,3);
L(1,3,3,3);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF bStart then
FP_POS_UNIT_GET_STATUS(s1_Slot := iSlotNumberPositioningUnit,
s2_Axis := iPositioningUnit_Axis,
d1_Status => dutPositioningUnitAxisStatus.w0);
END_IF;