


 PulseOutput_Pass_FB
PulseOutput_Pass_FB圆弧插补(通过位置)
根据功能块和指定DUT中的参数从两个通道输出脉冲,从而使目标位置路径形成圆弧。通过指定中心位置和结束位置来计算圆的半径。当指定通道的控制标志为FALSE且执行条件为TRUE时,从该通道输出脉冲。
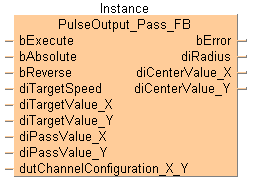
输入
激活功能块
绝对值控制 = TRUE, 相对值控制 = FALSE
TRUE=旋转方向:反转

FALSE=旋转方向:正转

目标速度:两个轴的复合速度 = 100–20000 (100Hz–20kHz)
目标值 [脉冲]:-8388608–8388607
目标值 [脉冲]:-8388608–8388607
目标值 [脉冲]:-8388608–8388607
目标值 [脉冲]:-8388608–8388607
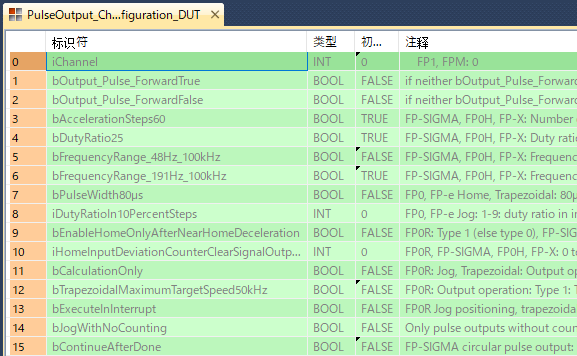
用于通道配置的预定义系统DUT:PulseOutput_Channel_Configuration_DUT
通道:0、2
输出
如果应用的输入值无效,则为TRUE。功能块停止执行。
半径[脉冲]
X轴中心值 [脉冲] = -8388608–8388607
Y轴中心值 [脉冲] = -8388608–8388607
这种非内联指令是脉冲输出工具指令的一部分。有关内部使用指令的详细描述,请参阅: F176_PulseOutput_Pass
使用PulseInfo_IsActive检查所选通道的控制标志是否为FALSE。
使用数据单元类型(DUT),可以定义由其他数据类型组成的数据单元类型。DUT首先在DUT池中定义,然后像全局变量列表或POU头中的标准数据类型(BOOL、INT等)一样进行处理。

所有用于编程此函数的输入和输出变量已在POU头中声明。 所有编程语言使用相同的POU头。
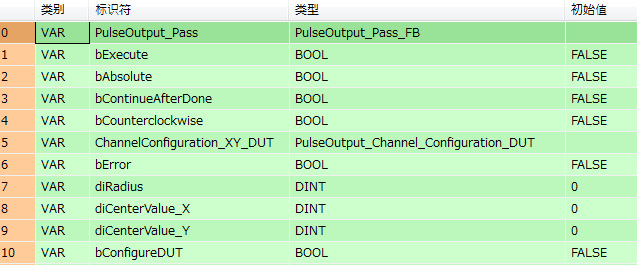
VAR
PulseOutput_Pass: PulseOutput_Pass_FB;
bExecute: BOOL:=FALSE;
bAbsolute: BOOL:=FALSE;
bContinueAfterDone: BOOL:=FALSE;
bCounterclockwise: BOOL:=FALSE;
ChannelConfiguration_XY_DUT: PulseOutput_Channel_Configuration_DUT;
bError: BOOL:=FALSE;
diRadius: DINT:=0;
diCenterValue_X: DINT:=0;
diCenterValue_Y: DINT:=0;
bConfigureDUT: BOOL:=FALSE;
@'': @'';
END_VAR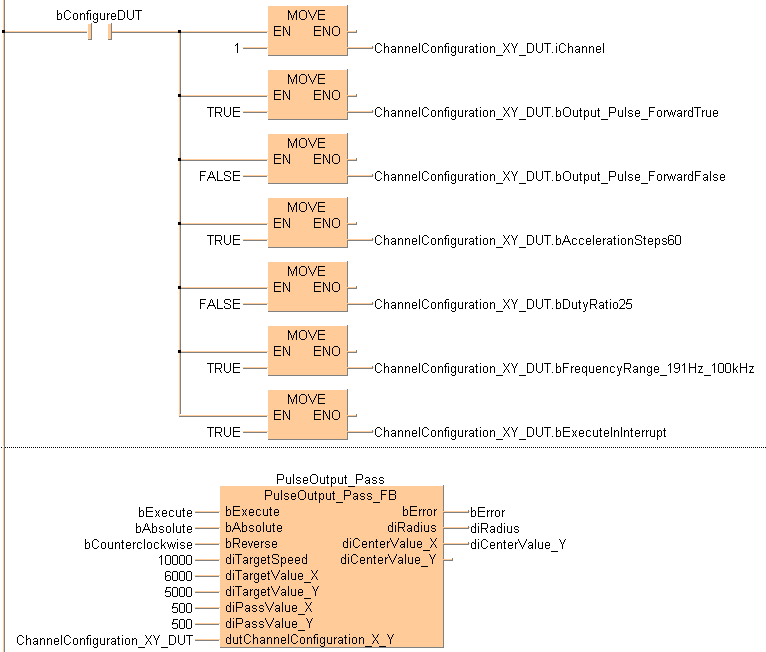
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 28 ;
NETWORK_BODY
B(B_CONTACT,,bConfigureDUT,6,1,8,3,);
B(B_F,E_MOVE!,,17,0,23,4,,?DEN?D?AENO?C);
B(B_VARIN,,1,15,2,17,4,);
B(B_F,E_MOVE!,,17,8,23,12,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,15,10,17,12,);
B(B_VAROUT,,ChannelConfiguration_XY_DUT.bOutput_Pulse_ForwardFalse,23,10,25,12,);
B(B_F,E_MOVE!,,17,12,23,16,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,17,4,23,8,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,15,6,17,8,);
B(B_VAROUT,,ChannelConfiguration_XY_DUT.bOutput_Pulse_ForwardTrue,23,6,25,8,);
B(B_VARIN,,TRUE,15,14,17,16,);
B(B_VAROUT,,ChannelConfiguration_XY_DUT.iChannel,23,2,25,4,);
B(B_F,E_MOVE!,,17,16,23,20,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,15,18,17,20,);
B(B_VAROUT,,ChannelConfiguration_XY_DUT.bDutyRatio25,23,18,25,20,);
B(B_VAROUT,,ChannelConfiguration_XY_DUT.bAccelerationSteps60,23,14,25,16,);
B(B_VAROUT,,ChannelConfiguration_XY_DUT.bFrequencyRange_191Hz_100kHz,23,22,25,24,);
B(B_VARIN,,TRUE,15,22,17,24,);
B(B_F,E_MOVE!,,17,20,23,24,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,17,24,23,28,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,15,26,17,28,);
B(B_VAROUT,,ChannelConfiguration_XY_DUT.bExecuteInInterrupt,23,26,25,28,);
L(8,2,17,2);
L(12,18,17,18);
L(12,14,17,14);
L(12,10,17,10);
L(12,6,17,6);
L(12,2,12,18);
L(12,18,12,22);
L(12,22,17,22);
L(12,22,12,26);
L(12,26,17,26);
L(1,2,6,2);
L(1,0,1,28);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 13 ;
NETWORK_BODY
B(B_VARIN,,bCounterclockwise,12,5,14,7,);
B(B_VARIN,,10000,12,6,14,8,);
B(B_VARIN,,6000,12,7,14,9,);
B(B_VARIN,,5000,12,8,14,10,);
B(B_VARIN,,500,12,9,14,11,);
B(B_VARIN,,500,12,10,14,12,);
B(B_VARIN,,ChannelConfiguration_XY_DUT,12,11,14,13,);
B(B_VAROUT,,diCenterValue_Y,29,5,31,7,);
B(B_VARIN,,bExecute,12,3,14,5,);
B(B_VARIN,,bAbsolute,12,4,14,6,);
B(B_VAROUT,,bError,29,3,31,5,);
B(B_VAROUT,,diRadius,29,4,31,6,);
B(B_FB,PulseOutput_Pass_FB!,PulseOutput_Pass,14,2,29,13,,?BbExecute?BbAbsolute?BbReverse?BdiTargetSpeed?BdiTargetValue_X?BdiTargetValue_Y?BdiPassValue_X?BdiPassValue_Y?BdutChannelConfiguration_X_Y?AbError?AdiRadius?AdiCenterValue_X?AdiCenterValue_Y);
L(1,0,1,13);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Used DUT parameters *)
ChannelConfiguration_XY_DUT.iChannel := 1;
ChannelConfiguration_XY_DUT.bOutput_Pulse_ForwardTrue := TRUE;
ChannelConfiguration_XY_DUT.bOutput_Pulse_ForwardFalse := FALSE;
ChannelConfiguration_XY_DUT.bAccelerationSteps60 := FALSE;
ChannelConfiguration_XY_DUT.bDutyRatio25 := TRUE;
ChannelConfiguration_XY_DUT.bFrequencyRange_191Hz_100kHz := TRUE;
ChannelConfiguration_XY_DUT.Jog_bNoCountingInCWCCWNoTargetValueMatch := FALSE;
ChannelConfiguration_XY_DUT.bExecuteInInterruptProgram := FALSE;
(* FB *)
PulseOutput_Pass(bExecute := bExecute,
bAbsolute := bAbsolute,
bContinueAfterDone := bContinueAfterDone,
bCounterclockwise := bCounterclockwise,
diTargetSpeed := 10000,
diTargetValue_X := 6000,
diTargetValue_Y := 5000,
diPassValue_X := 500,
diPassValue_Y := 500,
dutChannelConfiguration_X_Y := ChannelConfiguration_XY_DUT,
bError => bError,
diRadius => diRadius,
diCenterValue_X => diCenterValue_X,
diCenterValue_Y => diCenterValue_Y);