


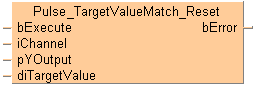
 Pulse_TargetValueMatch_Reset
Pulse_TargetValueMatch_Reset目标值匹配关闭(脉冲输出)
如果iChannel所指定脉冲输出通道的经过值与目标值diTargetValue匹配,则由pYOutput指定的输出继电器立即变为FALSE。
输入
上升沿激活函数;使用PulseInfo_IsTargetValueMatchActive评估脉冲输出通道控制标志
FPS: 0, 2
FP-X R: 0, 1
FP-X 16K C14T: 0, 1, 2
FP-X 32K C30T, C60T: 0, 1, 2, 3
FP0R: 0, 1, 2, 3
FP0: 0, 1
FP-e: 0, 1
GetPointer从提供通道编号和输出的全局变量获得的指针结果
在以下范围内为目标值指定一个32位数据值:
FP0, FP-e: -838808~+8388607
FPS, FP-X, FP0R: -2147483467~+2147483648
输出
如果Channel%d和pYOuput.iOffset的组合与全局变量确定的通道编号和输出的有效组合不匹配,则为TRUE
这种非内联指令是脉冲输出工具指令的一部分。有关内部使用指令的详细描述,请参阅:F167_PulseOutput_Reset
若要验证通道和Y输出的组合,编译器需要以下全局变量的名称模式:%sPulse_TargetValueMatch_Channel%d_Y%d_%s
始终在目标值匹配控制中将此模式用于全局变量。
Channel%d必须是系统寄存器中启用的脉冲输出通道编号
Y%d 必须是PLC支持的明确输出地址
FP-S, FP0, FP-e: |
Y0~Y7 |
FP-S(V3.1或更高版本),FP0R: |
Y0~Y1F |
FP-X: |
Y0~Y29F |
%s 是模式开头的可选描述符
_%s 是模式结尾的可选描述符
| 可选 | 固定模式 | 可选 |
g_b |
Pulse_TargetValueMatch_ChannelA_Y11F |
_MotorOn |
此全局变量生成适用于通道A和输出Y11F的代码。
在全局变量列表中,定义项目中所有POU都可以访问的变量。


所有用于编程此函数的输入和输出变量已在POU头中声明。 所有编程语言使用相同的POU头。
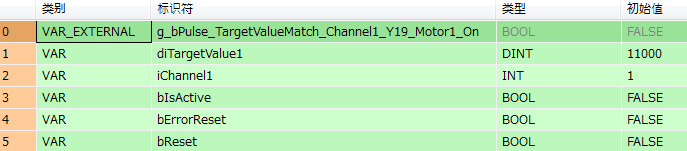
VAR_EXTERNAL
g_bPulse_TargetValueMatch_Channel1_Y19_Motor1_On: BOOL:=FALSE;
END_VAR
VAR
iChannel1: INT:=1;
diTargetValue1: DINT:=22000;
bIsActive: BOOL:=FALSE;
bErrorReset: BOOL:=FALSE;
bReset: BOOL:=FALSE;
END_VAR使用PulseInfo_IsTargetValueMatchActive来评估通道iChannel1是否已激活。如果在bReset检测到上升沿且bIsActive不为TRUE,将执行操作。通道编号与输出触点的组合将在全局变量g_bPulse_TargetValueMatch_Channel1_Y19_Motor1_On中得到验证。当通道1的脉冲输出达到目标值diTargetValue1,输出Y19将被设置为FALSE。

BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_VARIN,,iChannel1,7,1,9,3,);
B(B_VAROUT,,bIsActive,26,1,28,3,);
B(B_F,PulseInfo_IsTargetValueMatchActive!,,9,0,26,3,,?DiChannel?C);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,bReset,3,1,5,3,R);
B(B_CONTACT,,bIsActive,7,1,9,3,N);
B(B_VARIN,,iChannel1,32,2,34,4,);
B(B_VARIN,,diTargetValue1,32,4,34,6,);
B(B_VAROUT,,bErrorReset,52,1,54,3,);
B(B_F,GetPointer!,,27,3,34,5,,?D?C);
B(B_VARIN,,g_bPulse_TargetValueMatch_Channel1_Y19_Motor1_On,25,3,27,5,);
B(B_F,Pulse_TargetValueMatch_Reset!,,34,0,49,6,,?DbExecute?DiChannel?DpYOutput?DdiTargetValue?CbError);
L(5,2,7,2);
L(1,2,3,2);
L(9,2,34,2);
L(49,2,52,2);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
END_BODYbIsActive:=PulseInfo_IsTargetValueMatchActive(iChannel1);
Pulse_TargetValueMatch_Reset(bExecute := DF(bReset) AND NOT bIsActive,
iChannel := iChannel1,
pYOutput := GetPointer(g_bPulse_TargetValueMatch_Channel1_Y19_Motor1_On),
diTargetValue := diTargetValue1,
bError => bErrorReset);