


 TON
TON带有打开延迟的定时器
通过功能块TON可编程打开延迟。
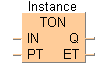
输入
定时器打开
对于在IN检测到的各个上升沿,内部定时器启动
打开延迟(PT = 预置时间)
16位值:0~327.27s
32位值:0~21,474,836.47s (不可用于FP3、FPC、FP5、FP10/10S的32位值)
每个分辨率10ms
输出
比较输出信号
如果PT = ET,设置为TRUE
经过时间
表示经过时间的当前值
通过从编程编辑器写入变量,可以在计数操作过程中改变数值。
Q设置为以PT中定义的时间延迟。复位时不延迟。
如果仅对延迟时间段PT或甚至更短的时间段(t3 - t2 < PT)设置输入IN,将不会设置Q。


所有用于编程此函数的输入和输出变量已在POU头中声明。 所有编程语言使用相同的POU头。
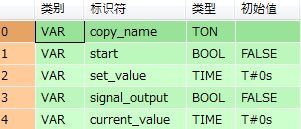
VAR
copy_name: TON;
start: BOOL:=FALSE;
set_value: TIME:=T#0s;
signal_output: BOOL:=FALSE;
current_value: TIME:=T#0s;
END_VAR如果设置start(状态 = TRUE),输入信号以延迟set_value时间段被传输到signal_output。

BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,start,3,2,5,4,);
B(B_VARIN,,set_value,7,3,9,5,);
B(B_VAROUT,,current_value,14,3,16,5,);
B(B_COIL,,signal_output,21,2,23,4,);
B(B_FB,TON!,copy_name,9,1,14,5,,?BIN?BPT?AQ?AET);
L(1,3,3,3);
L(1,0,1,6);
L(5,3,9,3);
L(14,3,21,3);
END_NETWORK_BODY
END_NET_WORK
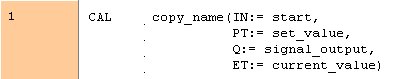
END_BODYcopy_name( IN:= start ,
PT:= set_value ,
Q=> signal_output ,
ET=> current_value );如果要调用指令列表中的功能块,请输入以下内容:
所有用于编程此函数的输入和输出变量已在POU头中声明。 所有编程语言使用相同的POU头。
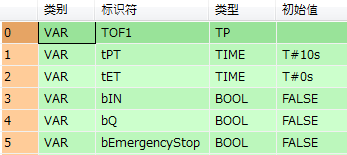
VAR
TOF1: TOF;
tPT: TIME:=T#10s;
tET: TIME:=T#0s;
bIN: BOOL:=FALSE;
bQ: BOOL:=FALSE;
bEmergencyStop: BOOL:=FALSE;
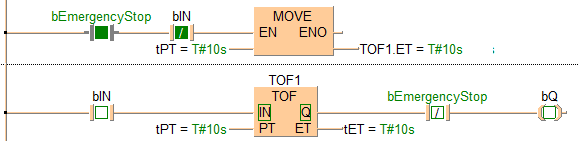
END_VAR在bIN的下降沿之后,定时器开始计数且Q设置为TRUE。当在经过定时器值之前bEmergencyStop设置为TRUE时,计数停止且输出Q立即复位。在此例中,以10s的预置时间PT初始化定时器。
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_F,E_MOVE!,,16,0,22,4,,?DEN?D?AENO?C);
B(B_VARIN,,tPT,14,2,16,4,);
B(B_VAROUT,,TOF1.ET,22,2,24,4,);
B(B_CONTACT,,bIN,11,1,13,3,N);
B(B_CONTACT,,bEmergencyStop,6,1,8,3,);
L(1,2,6,2);
L(13,2,16,2);
L(8,2,11,2);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_FB,TOF!,TOF1,16,1,21,5,,?BIN?BPT?AQ?AET);
B(B_VARIN,,tPT,14,3,16,5,);
B(B_VAROUT,,tET,21,3,23,5,);
B(B_CONTACT,,bIN,6,2,8,4,);
B(B_COIL,,bQ,34,2,36,4,);
B(B_CONTACT,,bEmergencyStop,27,2,29,4,N);
L(21,3,27,3);
L(29,3,34,3);
L(8,3,16,3);
L(1,3,6,3);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYif (bEmergencyStop AND NOT bIN) then
TOF1.ET:=tPT;
end_if;
TOF1(IN := bIN, PT := tPT, ET => tET);
bQ := NOT bEmergencyStop AND TOF1.Q;