


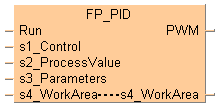
 FP_PID
FP_PIDPID処理(PWM出力指定可能)
PID処理は、できる限りプロセス値PVを設定値SPに近づける制御を行います。FP_PID_BASIC命令とは異なり、この命令では、PWM出力(ON-OFF出力)が可能です。PID制御データKp、Ti、Tdを自動的に求めるオートチューニング機能もあります。
入力
開始条件
制御データ
測定値 (-30000–30000)
PID制御パラメータ
入出力
PIDパラメータのデータテーブル
Runで指定した実行条件がTRUEになるとき、命令を最初に実行する場合、初期値がDUT要素1~9に書き込まれます。
FP_PIDの2回目の実行前に、DUTのDUT要素1~9を必要な値に変更する必要があります。
出力
PWM出力(オプション: 演算結果出力値MVの代わりに使用可能)
PWM出力の間隔(サイクル)は、サンプリング時間Ts(PWM出力の周期は1/Ts)です。デューティは出力値MVで単位は0.01%です。例えば、MV = 10000は、デューティ100%を表します。
命令は2回実行する必要があります。最初の実行によって PID_WORK_AREA_DUTの値がリセットされます。命令の2回目の実行で正しい値が使用されるように、 PID_WORK_AREA_DUTのDUT要素1から9の正しい値を設定する必要があります。
インデックス修飾時にエリアを超えたとき
PID_Parameters_DUTのパラメータに指定された値が許容範囲外のとき
インデックス修飾時にエリアを超えたとき
PID_Parameters_DUTのパラメータに指定された値が許容範囲外のとき

POUヘッダには、このプログラムで使用するすべての入力変数と出力変数を宣言します。 POUヘッダは全プログラム言語で使用できます。
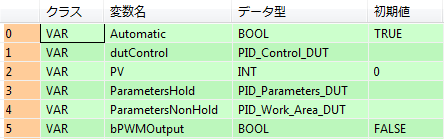
VAR
Automatic: BOOL:=TRUE;
dutControl: PID_Control_DUT;
PV: INT:=0;
ParametersHold: PID_Parameters_DUT;
ParametersNonHold: PID_Work_Area_DUT;
bPWMOutput: BOOL:=FALSE;
END_VAR
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 7 ;
NETWORK_BODY
B(B_VARIN,,dutControl,15,2,17,4,);
B(B_VARIN,,ParametersHold,15,4,17,6,);
B(B_CONTACT,,Automatic,6,1,8,3,);
B(B_VARIN,,ParametersNonHold,15,5,17,7,);
B(B_F,FP_PID!,,17,0,30,7,,?DRun?Ds1_Control?Ds2_ProcessValue?Ds3_Parameters?Ds4_WorkArea?As4_WorkArea?APWM);
B(B_VARIN,,PV,15,3,17,5,);
B(B_VAROUT,,bPWMOutput,30,1,32,3,);
L(1,2,6,2);
L(8,2,17,2);
L(1,0,1,7);
END_NETWORK_BODY
END_NET_WORK
END_BODYbPWMOutput := FP_PID(Run := Automatic,
s1_Control := dutControl,
s2_ProcessValue := PV,
s3_Parameters := ParametersHold,
s4_WorkArea := ParametersNonHold);