


 FP_POS_UNIT_SET_TABLE
FP_POS_UNIT_SET_TABLE位置決め開始テーブル設定
このFP命令は、実行条件ENがTRUEのとき、s3_Tableで設定された位置決めテーブルに従って、s1_Slotで指定されたスロット内で、s2_Axisで指定された軸用の位置決めユニットの位置決めを開始します。Configurator PM7に位置決めテーブルを設定します。
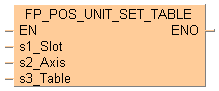
入力
スロット番号
軸番号
値:1–4、8 (仮想軸)
位置決めテーブル番号
値: 1–600、10001–10025
インデックス修飾時にエリアを超えたとき
スロット番号/軸番号が利用可能範囲外のとき
インデックス修飾時にエリアを超えたとき
スロット番号/軸番号が利用可能範囲外のとき
グローバル変数リストでは、プロジェクト内のすべてのPOUからアクセスできる変数を宣言します。

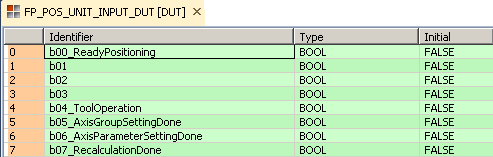
入力
出力
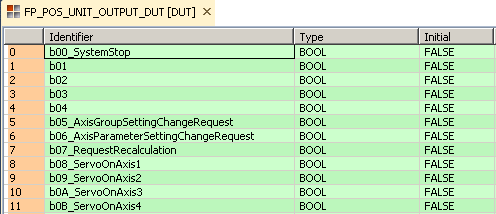
DUTをクリップボードにコピーし、そのDUTをナビゲータのDUTプールに直接貼り付けて、このDUTをプログラムで使用します。
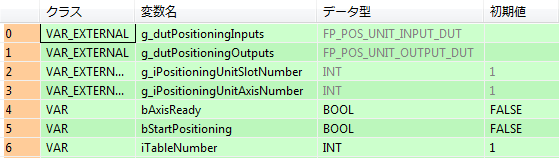
POUヘッダには、このプログラムで使用するすべての入力変数と出力変数を宣言します。 POUヘッダは全プログラム言語で使用できます。
変数bStartがFALSEからTRUEに変化すると、このファンクションが実行されます。
VAR_EXTERNAL
g_dutPositioningInputs: FP_POS_UNIT_INPUT_DUT;
g_dutPositioningOutputs: FP_POS_UNIT_OUTPUT_DUT;
END_VAR
VAR_EXTERNAL CONSTANT
g_iPositioningUnitSlotNumber: INT:=1;
g_iPositioningUnitAxisNumber: INT:=1;
END_VAR
VAR
bAxisReady: BOOL:=FALSE;
bStartPositioning: BOOL:=FALSE;
iTableNumber: INT:=1;
@'': @'';
END_VAR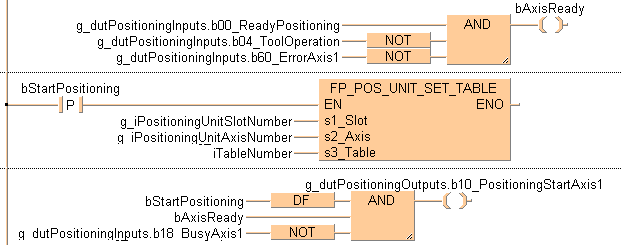
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,g_dutPositioningInputs.b00_ReadyPositioning,21,1,23,3,);
B(B_VARIN,,g_dutPositioningInputs.b04_ToolOperation,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b60_ErrorAxis1,21,3,23,5,);
B(B_F,NOT!,,23,2,28,4,,?D?C);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,bAxisReady,43,1,45,3,);
L(23,2,28,2);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,bStartPositioning,5,1,7,3,R);
B(B_F,FP_POS_UNIT_SET_TABLE!,,25,0,38,6,,?DEN?Ds1_Slot?Ds2_Axis?Ds3_Table?AENO);
B(B_VARIN,,g_iPositioningUnitSlotNumber,23,2,25,4,);
B(B_VARIN,,g_iPositioningUnitAxisNumber,23,3,25,5,);
B(B_VARIN,,iTableNumber,23,4,25,6,);
L(1,2,5,2);
L(7,2,25,2);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,bStartPositioning,21,1,23,3,);
B(B_VARIN,,bAxisReady,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b18_BusyAxis1,21,3,23,5,);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,g_dutPositioningOutputs.b10_PositioningStartAxis1,43,1,45,3,);
B(B_F,DF!,,23,0,28,3,,?Di?Co);
L(23,3,28,3);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYIf (g_dutPositioningInputs.b00_ReadyPositioning AND NOT g_dutPositioningInputs.b04_ToolOperation
AND NOT g_dutPositioningInputs.b60_ErrorAxis1) then
bAxisReady:=TRUE;
End_if;
If (bStart) then
FP_POS_UNIT_SET_TABLE(s1_Slot := g_iPositioningUnitSlotNumber,
s2_Axis := g_iPositioningUnitAxisNumber,
s3_Table := iTableNumber);
End_if;
If DF((bStart) AND bAxisReady Then AND NOT g_dutPositioningInputs.b18_BusyAxis1) then
g_dutPositioningOutputs.b10_PositioningStartAxis1:=TRUE;
End_if;