


 PulseOutput_Jog_FB
PulseOutput_Jog_FBJOG運転
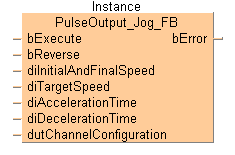
入力
実行条件:
エッジトリガ使用
速度の変更が必要な場合、不変
動作方向、正転 = FALSE、逆転 = TRUE
初速(F171_PulseOutput_Trapezoidal): 1~50000 (1Hz~50kHz)
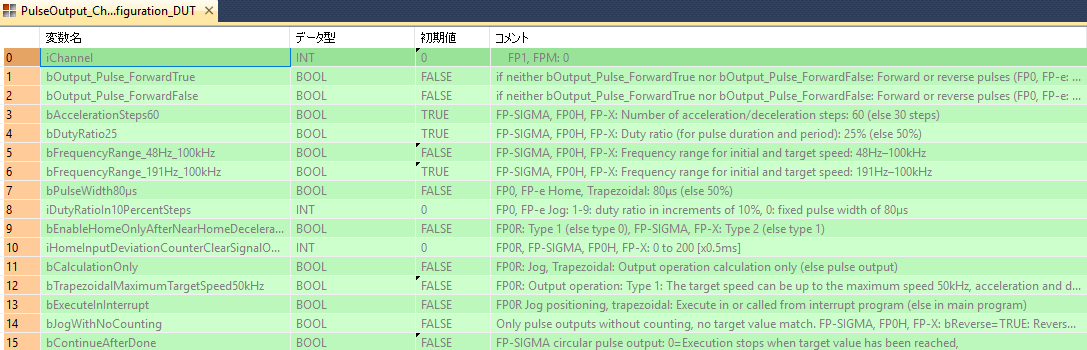
目標速度: PulseOutput_Channel_Configuration_DUTで選択した周波数レンジに従って、以下の値を設定:
FPS、FP-X: 1~9800 (1.5Hz~9.8kHz)
48~100000 (48Hz~100kHz)
191~100000 (191~100kHz)
F171_PulseOutput_Trapezoidal: 1~50000 (1Hz~50kHz)
FP0、F168_PulseOutput_Trapezoidal: 40~5000 (40Hz~5kHz)
加速時間(F171_PulseOutput_Trapezoidal): 1ms~32760ms (最高速度まで)
減速時間(F171_PulseOutput_Trapezoidal): 1ms~32760ms (最高速度から)
出力
割り付けた入力値が無効のときにTRUE。ファンクションブロックの実行は停止します。
この非インライン命令は、パルス出力用Tool命令の一部です。内部で使われる命令に関する詳細は、をご参照ください。F172_PulseOutput_Jog.PulseInfo_IsActiveを使用して、選択したチャンネルの制御フラグがFALSEかどうかをチェックします。
DUT構造体はData Unit Typeの略で、複数の異なるデータ型をもつ変数で構成されます。構造体をまず定義し、その後、標準的なデータ型(BOOL、INTなど)と同様にグローバル変数リストやPOUヘッダで使用します。

POUヘッダには、このプログラムで使用するすべての入力変数と出力変数を宣言します。 POUヘッダは全プログラム言語で使用できます。
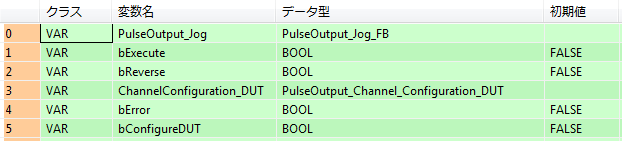
VAR
PulseOutput_Jog: PulseOutput_Jog_FB;
bExecute: BOOL:=FALSE;
bReverse: BOOL:=FALSE;
ChannelConfiguration_DUT: PulseOutput_Channel_Configuration_DUT;
bError: BOOL:=FALSE;
bConfigureDUT: BOOL:=FALSE;
END_VAR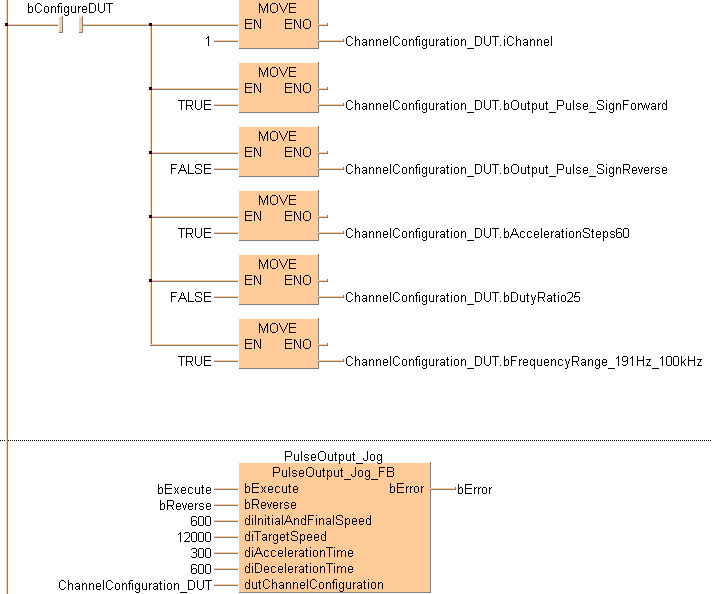
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 28 ;
NETWORK_BODY
B(B_CONTACT,,bConfigureDUT,4,1,6,3,);
B(B_F,E_MOVE!,,15,0,21,4,,?DEN?D?AENO?C);
B(B_VARIN,,1,13,2,15,4,);
B(B_F,E_MOVE!,,15,8,21,12,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,10,15,12,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignReverse,21,10,23,12,);
B(B_F,E_MOVE!,,15,12,21,16,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,15,4,21,8,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,13,6,15,8,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignForward,21,6,23,8,);
B(B_VARIN,,TRUE,13,14,15,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.iChannel,21,2,23,4,);
B(B_F,E_MOVE!,,15,16,21,20,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,18,15,20,);
B(B_VAROUT,,ChannelConfiguration_DUT.bDutyRatio25,21,18,23,20,);
B(B_F,E_MOVE!,,15,20,21,24,,?DEN?D?AENO?C);
B(B_VAROUT,,ChannelConfiguration_DUT.bAccelerationSteps60,21,14,23,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz,21,22,23,24,);
B(B_VARIN,,TRUE,13,22,15,24,);
L(6,2,10,2);
L(1,2,4,2);
L(10,2,15,2);
L(10,22,15,22);
L(10,18,15,18);
L(10,14,15,14);
L(10,10,15,10);
L(10,6,15,6);
L(10,2,10,22);
L(1,0,1,28);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 10 ;
NETWORK_BODY
B(B_FB,PulseOutput_Jog_FB!,PulseOutput_Jog,15,1,28,10,,?BbExecute?BbReverse?BdiInitialAndFinalSpeed?BdiTargetSpeed?BdiAccelerationTime?BdiDecelerationTime?BdutChannelConfiguration?AbError);
B(B_VARIN,,bExecute,13,2,15,4,);
B(B_VARIN,,bReverse,13,3,15,5,);
B(B_VARIN,,600,13,4,15,6,);
B(B_VARIN,,12000,13,5,15,7,);
B(B_VARIN,,300,13,6,15,8,);
B(B_VARIN,,600,13,7,15,9,);
B(B_VARIN,,ChannelConfiguration_DUT,13,8,15,10,);
B(B_VAROUT,,bError,28,2,30,4,);
L(1,0,1,10);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Used DUT parameters *)
ChannelConfiguration_DUT.iChannel := 1;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardTrue := TRUE;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardFalse := FALSE;
ChannelConfiguration_DUT.bAccelerationSteps60 := FALSE;
ChannelConfiguration_DUT.bDutyRatio25 := TRUE;
ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz := TRUE;
ChannelConfiguration_DUT.bExecuteInInterrupt := FALSE;
(* FB *)
PulseOutput_Jog(bExecute := bExecute,
bReverse := bReverse,
diInitialAndFinalSpeed := 600,
diTargetSpeed := 12000,
diAccelerationTime := 300,
diDecelerationTime := 600,
dutChannelConfiguration := ChannelConfiguration_DUT,
bError => bError);