


 FP_PID_BASIC
FP_PID_BASICPID 처리
이 FP 명령은 측정값(예: 온도)과 사전 결정된 출력값(예: 20°C)이 주어진 프로세스(예: 히터)를 통제합니다.
입력/출력
파라미터의 자세한 내용은 PID_DUT_31을 참조해 주십시오.
이 명령은 파라미터가 s_PidDut 입력에서 입력된 요소 30개를 사용하여 ARRAY 형태로 데이터 테이블에서 결정되는 PID 알고리즘을 계산합니다.
파라미터 설정이 허용 범위를 벗어나는 경우
파라미터 설정이 허용 범위를 벗어나는 경우

이 펑션 프로그램 시 사용한 모든 입력과 출력 변수는 POU 헤더에서 선언되었습니다. 모든 프로그래밍 언어에 같은 POU 헤더를 사용합니다.

VAR
Automatic: BOOL:=TRUE;
PidDut: PID_DUT_31;
END_VAR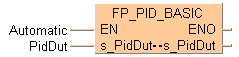
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_VARIN,,Automatic,14,1,16,3,);
B(B_VARIN,,PidDut,14,2,16,4,);
B(B_F,FP_PID_BASIC!,,16,0,25,4,,?DEN?Ds_PidDut?As_PidDut?AENO);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF (Automatic) then
FP_PID_BASIC(s_PidDut := s_PidDut);
END_IF;