


 PulseOutput_Home_FB
PulseOutput_Home_FB원점복귀
이 명령은 펑션블록과 지정된 DUT의 파라미터에 따라 원점 복귀를 수행합니다. 지정된 채널의 제어 플래그가 FALSE이고 실행 조건이 TRUE이면 이 채널에서 펄스가 출력됩니다.
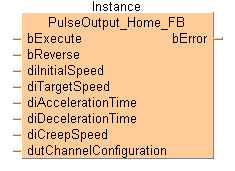
입력
상승 엣지는 펑션 블록을 활성화
이동 방향: 정방향 = FALSE, 역방향 = TRUE
초기 속도/타겟 속도: 이 값을 PulseOutput_Channel_Configuration_DUT에서 선택한 주파수 범위에 따라 설정합니다.
FPS, FP-X: 1~9800(1,5Hz~9,8kHz)
48~100000(48Hz~100kHz)
191~100000(191~100kHz)
F171_PulseOutput_Trapezoidal: 1~50000(1Hz~50kHz)
FP0, F168_PulseOutput_Trapezoidal: 40~5000(40Hz~5kHz)
가속/감속 시간(FPS, FP-X):
30스텝 포함: 30ms~32760ms (30스텝에서 지정)
60스텝 포함: 60ms~32760ms (60스텝에서 지정)
가속/감속 시간(FP0, F168_PulseOutput_Trapezoidal): 30ms~32760ms
가속 시간(F171_PulseOutput_Trapezoidal): 1ms~32760ms
감속 시간(F171_PulseOutput_Trapezoidal): 1ms~32760ms
크립 속도(F171_PulseOutput_Trapezoidal): 1~50000(1Hz~50kHz)
출력
적용된 입력 값이 무효인 경우에는 TRUE입니다. 펑션블록 실행이 정지됩니다.
이 비 인라인 명령은 펄스 출력의 도구 명령 일부입니다. 내부에서 사용되는 명령의 자세한 내용은 :
FPS, FP-X: F171_PulseOutput_Home
FP-e, FP0: F168_PulseOutput_Home
PulseInfo_IsActive를 사용하여 선택한 채널의 제어 플래그가 FALSE인지 확인합니다.PulseInfo_IsHomeInputTrue를 사용하여 원점 입력이 TRUE인지 확인합니다.
오작동 또는 연산 에러 방지:
원점 복귀 사용 시 시스템 레지스터를 펄스 출력 모드로 설정해야 합니다.
펄스 캐치 입력, 인터럽트 입력 또는 고속 카운터와 같은 다른 명령을 통해 원점 입력이 발생하지 않을 수 있습니다.
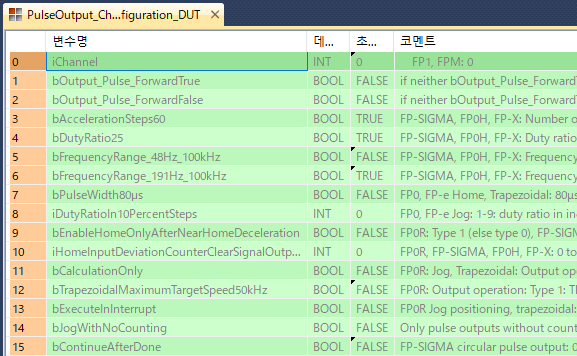
구조체(DUT)를 사용하여 다른 데이터 형식으로 구성된 구조체를 정의할 수 있습니다. DUT는 먼저 DUT 풀에서 정의된 후 POU 헤더의 전역 변수 목록에서 표준 데이터 형식(BOOL, INT 등)으로 처리됩니다.

이 펑션 프로그램 시 사용한 모든 입력과 출력 변수는 POU 헤더에서 선언되었습니다. 모든 프로그래밍 언어에 같은 POU 헤더를 사용합니다.
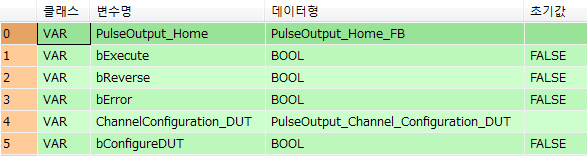
VAR
PulseOutput_Home: PulseOutput_Home_FB;
bExecute: BOOL:=FALSE;
bReverse: BOOL:=FALSE;
bError: BOOL:=FALSE;
ChannelConfiguration_DUT: PulseOutput_Channel_Configuration_DUT;
bConfigureDUT: BOOL:=FALSE;
END_VAR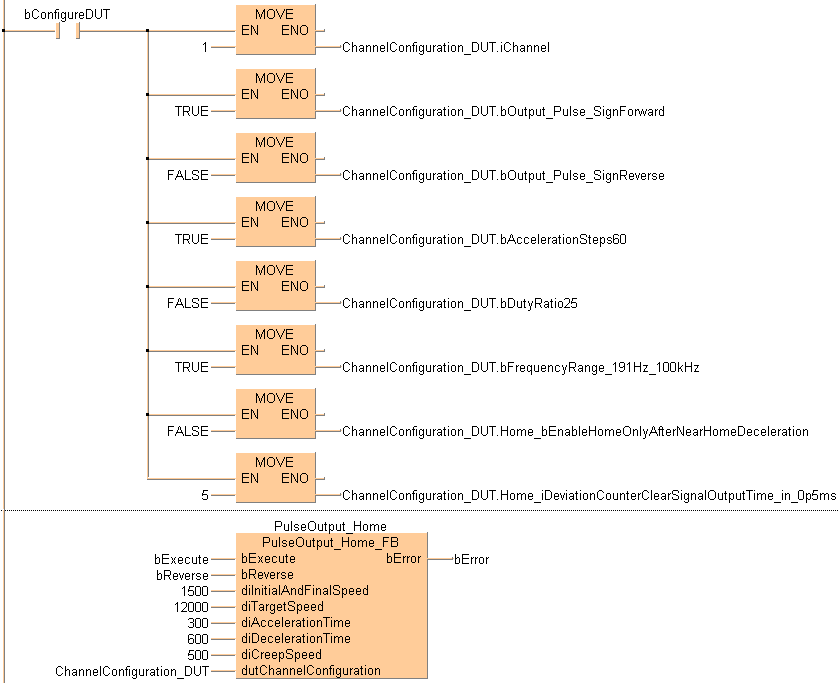
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 32 ;
NETWORK_BODY
B(B_CONTACT,,bConfigureDUT,4,1,6,3,);
B(B_F,E_MOVE!,,15,0,21,4,,?DEN?D?AENO?C);
B(B_VARIN,,1,13,2,15,4,);
B(B_F,E_MOVE!,,15,8,21,12,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,10,15,12,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignReverse,21,10,23,12,);
B(B_F,E_MOVE!,,15,12,21,16,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,15,4,21,8,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,13,6,15,8,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignForward,21,6,23,8,);
B(B_VARIN,,TRUE,13,14,15,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.iChannel,21,2,23,4,);
B(B_F,E_MOVE!,,15,16,21,20,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,18,15,20,);
B(B_VAROUT,,ChannelConfiguration_DUT.bDutyRatio25,21,18,23,20,);
B(B_F,E_MOVE!,,15,20,21,24,,?DEN?D?AENO?C);
B(B_VAROUT,,ChannelConfiguration_DUT.bAccelerationSteps60,21,14,23,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz,21,22,23,24,);
B(B_VARIN,,TRUE,13,22,15,24,);
B(B_F,E_MOVE!,,15,24,21,28,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,26,15,28,);
B(B_VAROUT,,ChannelConfiguration_DUT.Home_bEnableHomeOnlyAfterNearHomeDeceleration,21,26,23,28,);
B(B_F,E_MOVE!,,15,28,21,32,,?DEN?D?AENO?C);
B(B_VAROUT,,ChannelConfiguration_DUT.Home_iDeviationCounterClearSignalOutputTime_in_0p5ms,21,30,23,32,);
B(B_VARIN,,5,13,30,15,32,);
L(10,2,10,6);
L(10,10,10,14);
L(10,6,10,10);
L(10,14,10,18);
L(10,18,10,22);
L(10,22,10,26);
L(6,2,10,2);
L(1,2,4,2);
L(10,26,10,30);
L(10,30,15,30);
L(10,26,15,26);
L(10,22,15,22);
L(10,18,15,18);
L(10,6,15,6);
L(10,14,15,14);
L(10,10,15,10);
L(10,2,15,2);
L(1,0,1,32);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 11 ;
NETWORK_BODY
B(B_FB,PulseOutput_Home_FB!,PulseOutput_Home,15,1,28,11,,?BbExecute?BbReverse?BdiInitialAndFinalSpeed?BdiTargetSpeed?BdiAccelerationTime?BdiDecelerationTime?BdiCreepSpeed?BdutChannelConfiguration?AbError);
B(B_VARIN,,bExecute,13,2,15,4,);
B(B_VARIN,,bReverse,13,3,15,5,);
B(B_VARIN,,1500,13,4,15,6,);
B(B_VARIN,,12000,13,5,15,7,);
B(B_VARIN,,300,13,6,15,8,);
B(B_VARIN,,600,13,7,15,9,);
B(B_VARIN,,500,13,8,15,10,);
B(B_VARIN,,ChannelConfiguration_DUT,13,9,15,11,);
B(B_VAROUT,,bError,28,2,30,4,);
L(1,0,1,11);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Used DUT parameters *)
ChannelConfiguration_DUT.iChannel := 1;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardTrue := TRUE;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardFalse := FALSE;
ChannelConfiguration_DUT.bAccelerationSteps60 := FALSE;
ChannelConfiguration_DUT.bDutyRatio25 := TRUE;
ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz := TRUE;
ChannelConfiguration_DUT.Home_bEnableHomeOnlyAfterNearHomeDeceleration := FALSE;
ChannelConfiguration_DUT.Home_iDeviationCounterClearSignalOutputTime_in_0p5ms := 5;
ChannelConfiguration_DUT.bExecuteInInterrupt := FALSE;
(* FB *)
PulseOutput_Home(bExecute := bExecute,
bReverse := bReverse,
diInitialAndFinalSpeed := 1500,
diTargetSpeed := 12000,
diAccelerationTime := 300,
diDecelerationTime := 600,
diCreepSpeed := 500,
dutChannelConfiguration := ChannelConfiguration_DUT,
bError => bError);