F302_BTAN
F302_BTANBCD type tangent operation
The function calculates the tangent of BCD code angular data (input s) and stores the result (output d) as a BCD value in an array with three elements.
Input
Area where angle data is stored
Output
Result stored in 3 words
BCD values for input s lie in the area from 0° to 360° (16#0 to 16#360) in 1° steps. With this output d yields a result in the range of -57.2900 to 57.2900. The result is returned as follows:
preceding sign (0 when input is +, 1 when input is -)
whole number before the decimal point (0 or 1)
numbers after the decimal point with 4 significant figures as a BCD value (16#0000 to 16#9999).
if s is not a BCD value
if s is not between 0° and 360°.
if s is not a BCD value
if s is not between 0° and 360°.
if the result is 0.
if the result is overflowed.

All input and output variables used for programming this function have been declared in the POU header. The same POU header is used for all programming languages.
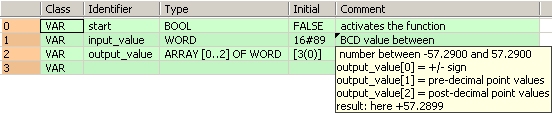
VAR
start: BOOL:=FALSE;
(*activates the function*)
input_value: ARRAY [0..2] OF WORD:=[2(0),16#5000];
(*corresponds to 0.5*)
output_value: WORD:=0;
(*result after a 0->1 leading
edge from start: 16#30
corresponds to 30°*)
END_VARIn this example, the input variable input_value is declared. However, you can write a constant (e.g. 16#89 for 89°) directly at the input contact of the function.
When the variable start is set to TRUE, the function is carried out. The input_value was initialized with the value 16#89 (89°) in the POU header. The result is written to the ARRAY output_value. Here in the first element of the ARRAY, the output_value = 16# (+ sign). In the second element, 16#57 represents the number before the decimal point, and 16#2899 comes after the decimal point in the third element.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 14 ;
NETWORK_BODY
B(B_VARIN,,output,6,1,8,3,);
B(B_VARIN,,input_value,6,2,8,4,);
B(B_VAROUT,,output_value,17,2,19,4,);
B(B_F,F302_BTAN,,8,0,17,4,,?DEN?D@'s'?AENO?Cd);
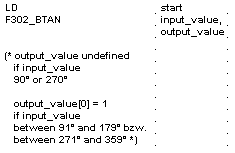
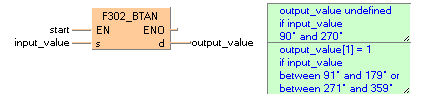
B(B_COMMENT,,output_value undefinedø^if input_valueø^90° or 270°,25,0,37,3,);
B(B_COMMENT,,output_value[0] = 1ø^if input_valueø^between 91° and 179° orø^between 271° and 359°,25,3,37,7,);
L(1,0,1,14);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF start THEN
F302_BTAN(input_value, output_value);
END_IF;