


 FP_POS_UNIT_SET_TABLE
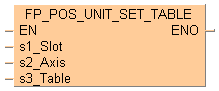
FP_POS_UNIT_SET_TABLESet positioning table
This FP instruction starts positioning for the positioning unit in the slot specified by s1_Slot and for the axis specified by s2_Axis according to the positioning table set at s3_Table if the trigger EN is TRUE. Configure the positioning table in the Configurator PM7.
Input
Slot number
Axis number
Values: 1–4, 8 (virtual axis)
Number of positioning table
Values: 1–600, 10001–10025
if the area specified using the index modifier exceeds the limit.
if the slot and/or axis number is out of range
if the area specified using the index modifier exceeds the limit.
if the slot and/or axis number is out of range
In the global variable list you define variables that can be accessed by all POUs in the project.

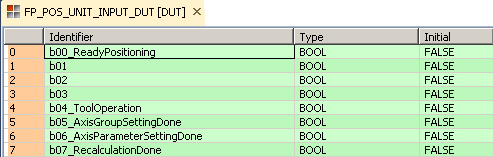
Input
Output
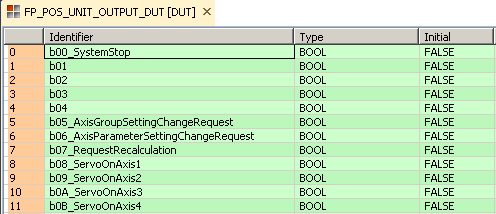
Copy the DUT to the clipboard and paste the DUT directly into the DUT pool of the navigator to use this DUT in your program.
All input and output variables used for programming this function have been declared in the POU header. The same POU header is used for all programming languages.
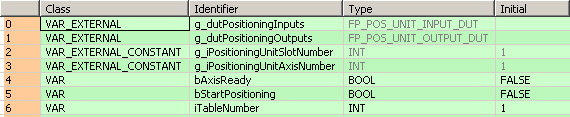
When the variable bStart changes from FALSE to TRUE, the function is carried out.
VAR_EXTERNAL
g_dutPositioningInputs: FP_POS_UNIT_INPUT_DUT;
g_dutPositioningOutputs: FP_POS_UNIT_OUTPUT_DUT;
END_VAR
VAR_EXTERNAL CONSTANT
g_iPositioningUnitSlotNumber: INT:=1;
g_iPositioningUnitAxisNumber: INT:=1;
END_VAR
VAR
bAxisReady: BOOL:=FALSE;
bStartPositioning: BOOL:=FALSE;
iTableNumber: INT:=1;
@'': @'';
END_VAR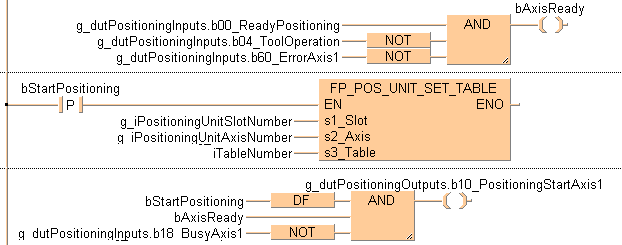
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,g_dutPositioningInputs.b00_ReadyPositioning,21,1,23,3,);
B(B_VARIN,,g_dutPositioningInputs.b04_ToolOperation,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b60_ErrorAxis1,21,3,23,5,);
B(B_F,NOT!,,23,2,28,4,,?D?C);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,bAxisReady,43,1,45,3,);
L(23,2,28,2);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,bStartPositioning,5,1,7,3,R);
B(B_F,FP_POS_UNIT_SET_TABLE!,,25,0,38,6,,?DEN?Ds1_Slot?Ds2_Axis?Ds3_Table?AENO);
B(B_VARIN,,g_iPositioningUnitSlotNumber,23,2,25,4,);
B(B_VARIN,,g_iPositioningUnitAxisNumber,23,3,25,5,);
B(B_VARIN,,iTableNumber,23,4,25,6,);
L(1,2,5,2);
L(7,2,25,2);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,bStartPositioning,21,1,23,3,);
B(B_VARIN,,bAxisReady,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b18_BusyAxis1,21,3,23,5,);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,g_dutPositioningOutputs.b10_PositioningStartAxis1,43,1,45,3,);
B(B_F,DF!,,23,0,28,3,,?Di?Co);
L(23,3,28,3);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYIf (g_dutPositioningInputs.b00_ReadyPositioning AND NOT g_dutPositioningInputs.b04_ToolOperation
AND NOT g_dutPositioningInputs.b60_ErrorAxis1) then
bAxisReady:=TRUE;
End_if;
If (bStart) then
FP_POS_UNIT_SET_TABLE(s1_Slot := g_iPositioningUnitSlotNumber,
s2_Axis := g_iPositioningUnitAxisNumber,
s3_Table := iTableNumber);
End_if;
If DF((bStart) AND bAxisReady Then AND NOT g_dutPositioningInputs.b18_BusyAxis1) then
g_dutPositioningOutputs.b10_PositioningStartAxis1:=TRUE;
End_if;